SECTION 6: T200 FUNCTIONAL OVERVIEW T200 User's Manual
PAGE 6-49
Tuning the Position loop.
The following technique should be used to tune the position loop using the set-up loop described earlier.
§ Enable the Servo-drive; Hardware Enable first using the external enable I/P, then Software Enable, with the
function generator initialised as detailed above.
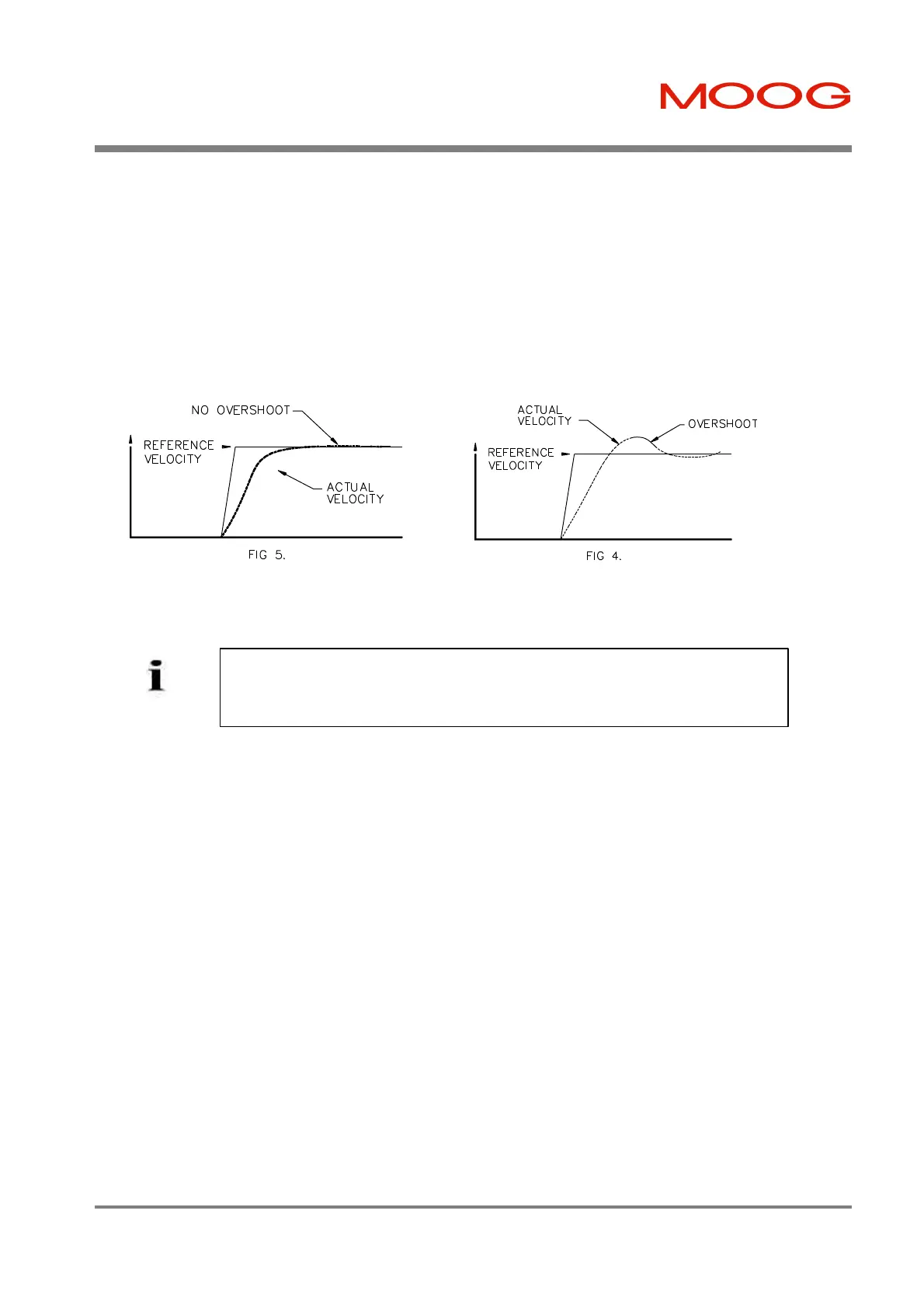
§ Use the GU command, while monitoring the velocity response on the oscilloscope, to increase the G gain (position
Loop Proportional Gain) until a slight overshoot occurs in the velocity response Fig 4. Use the GD command to
decrease the G gain until the overshoot just disappears (Fig 5).
6.7.3.10 Monitoring the Velocity Tracking in Position Mode
The T200 provides the same velocity monitoring in position mode as it does in velocity mode. See Section
6.7.2.11 Monitoring the Velocity Tracking, for a full description.
NOTE:- If the autotuner has already been used successfully, then the user can try a
value of Bandwidth * 2.0 for the Position Loop Gain parameter (G). This should be a
good first estimate for the position gain.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

 Loading...
Loading...


