E1 Series Servo Drive User Manual Basic Function Settings Before Operation
6-22 HIWIN MIKROSYSTEM CORP.
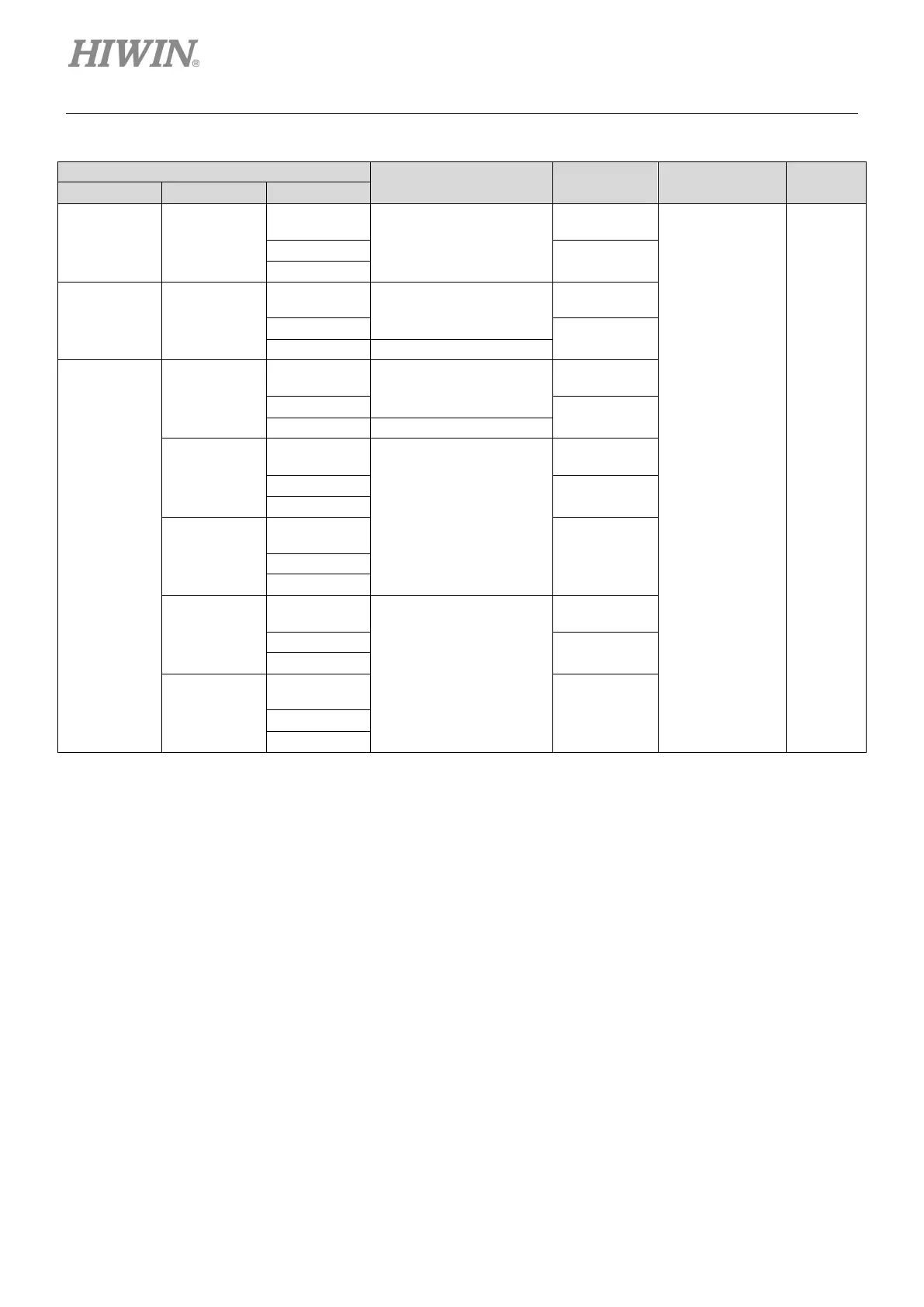
Table6.9.2.1
Motor Stopping Method
Motor State
Effective Category
t.0
(Default)
-
Zero clamp
After power on Setup
Free run
t.1 -
Dynamic brake
Free run
t.2
t.0
(Default)
Dynamic brake
Free run
t.1
Pt406 is used as the
maximum torque to
decelerate the motor.
Free run
t.2
Free run
t.3
Pt30A is used to
decelerate the motor.
Free run
t.4
Free run
Note:
(1) When Pt001 is set to t.0 or t.1, the setting of Pt00A is ignored.
(2) Pt00A = t.X is only effective in position mode and velocity mode. In torque mode, the setting of Pt00A =
t.X is ignored and only the setting of Pt001 = t.X will be applied.
(3) For more information of Pt406 (Emergency stop torque), please refer to section 6.7.3.
(4) For more information of Pt30A (Deceleration time for servo off and forced stop), please refer to section 6.7.3.
6.10 Detection for motor overload
Motor overload detection is used to detect overload warning and overload alarm to prevent motor from
overheating when the motor has been continuously used with load which exceeds its rating. The
detection timings of AL.910 (Overload) and AL.720 (Overload (continuous maximum load)) can be set by
parameters, but the detection value of AL.710 (Overload (instantaneous maximum load)) cannot be
changed.

 Loading...
Loading...


