E1 Series Servo Drive User Manual Basic Function Settings Before Operation
HIWIN MIKROSYSTEM CORP. 6-29
6.12.2 Tool
Users are allowed to use the following tool to initialize encoder.
Thunder
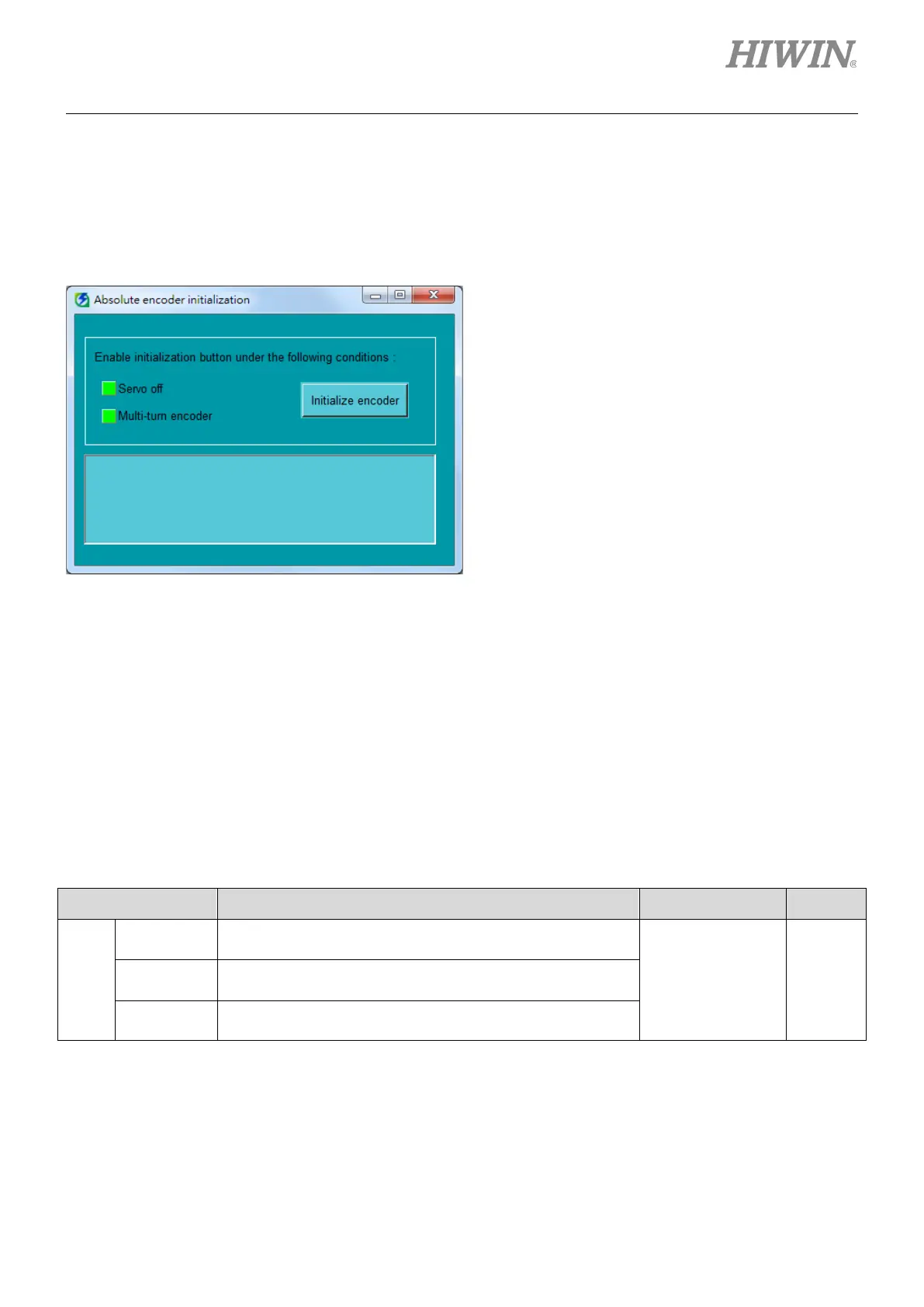
Figure6.12.2.1
Servo drive panel
Refer to section 14.4.7.
6.12.3 Parameter settings for encoder
Absolute encoder records the stop position of motor after power is turned off. Therefore, homing is not
required when the power is turned on again. Encoder type can be set by Pt002 = t.X.
Table6.12.3.1
Parameter Description Effective Category
Pt002
t.0
Use the encoder as a multi-turn absolute encoder. Battery
After power on Setup t.1
Use the encoder as an incremental encoder. Battery is not
required.
t.2
Use the multi-turn absolute encoder as a single-turn
absolute encoder. Battery is not required.
Note:
When an incremental encoder is used, no matter what the setting of Pt002= t.X is, it can only be used as an
incremental encoder.
Click on Tools on the menu bar of Thunder and
select Absolute encoder initialization.
Step 2:
Ensure Servo off indicator is green. Click on
Initialize encoder button and wait till encoder
initialization completes.
Step 3:
Turn off and turn on the servo drive.

 Loading...
Loading...


