E1 Series Servo Drive User Manual Application Function
HIWIN MIKROSYSTEM CORP. 8-49
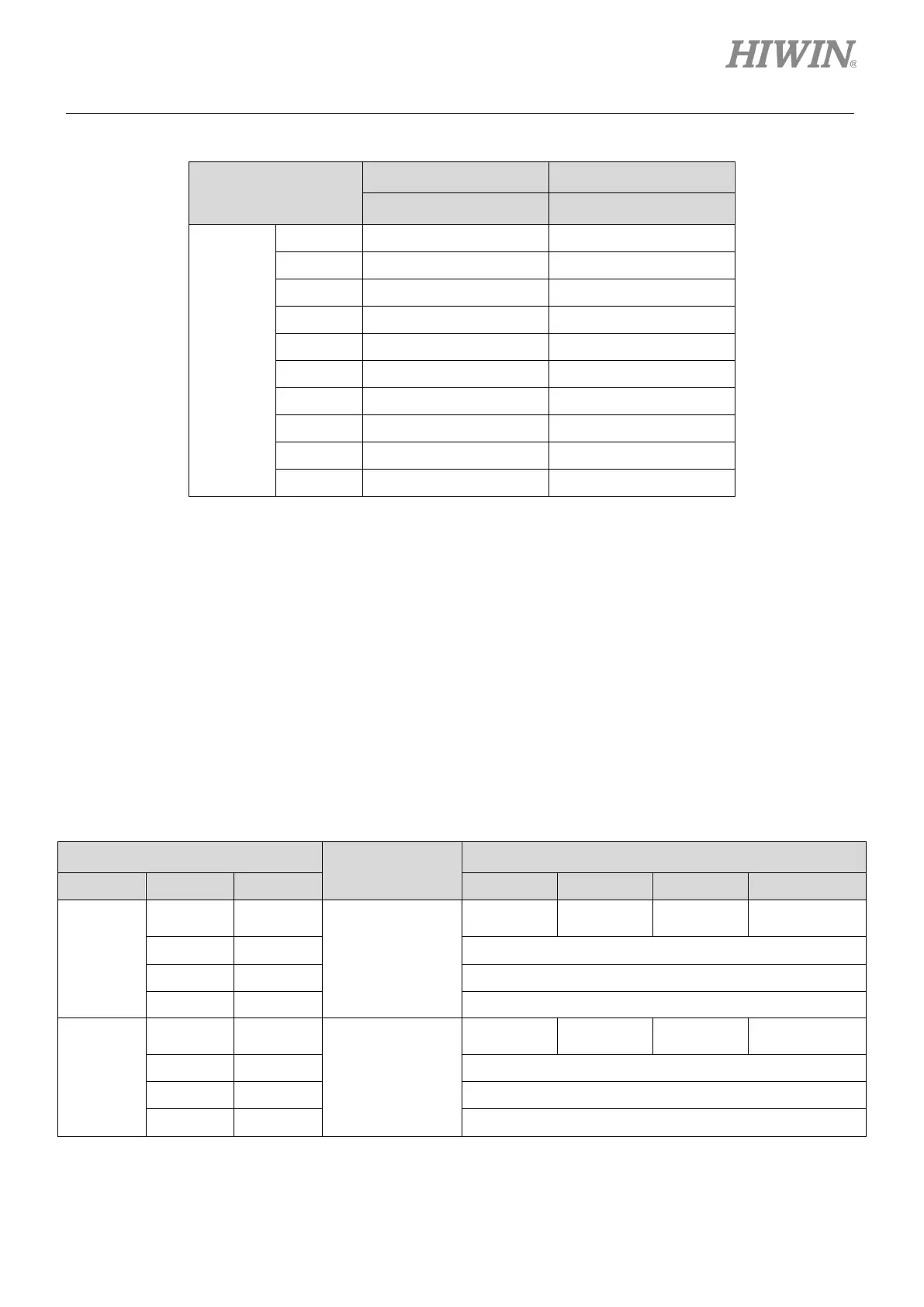
Table8.9.3
Parameter
OFF ON
Control Mode 1 Control Mode 2
Pt000
t.4 Internal velocity mode Position mode
t.5 Internal velocity mode Velocity mode
t.6 Internal velocity mode Torque mode
t.7 Position mode Velocity mode
t.8 Position mode Torque mode
t.9 Torque mode Velocity mode
t.B Internal position mode Position mode
t.C Internal position mode Velocity mode
t.D Internal position mode Torque mode
t.E Internal velocity mode Internal position mode
8.9.1 Pt000=t.□□X□ (control method selection) is set to 4, 5, 6 or E
When Pt000=t.X is set to 4, 5, 6 or E and Pt513 is set to t.0, use SPD-D, SPD-A and SPD-B
signals to switch control mode and internal set velocity. The control mode can be changed from position
mode, velocity mode, torque mode or internal position mode to internal velocity mode even when the
motor is operating.
Rotary servo motor
Table8.9.1.1
Input Signal
Motor Rotation
Direction
Pt000=t.X
SPD-D SPD-A SPD-B t.4 t.5 t.6 t.E
OFF
OFF OFF
Forward
OFF ON Operate at the internal set velocity 1 set by Pt301.
ON ON Operate at the internal set velocity 2 set by Pt302.
ON OFF Operate at the internal set velocity 3 set by Pt303.
ON
OFF OFF
Reverse
OFF ON Operate at the internal set velocity 1 set by Pt301.
ON ON Operate at the internal set velocity 2 set by Pt302.
ON OFF Operate at the internal set velocity 3 set by Pt303.

 Loading...
Loading...


