E1 Series Servo Drive User Manual Application Function
HIWIN MIKROSYSTEM CORP. 8-63
8.11 Internal homing
The purpose of homing is to find the user-defined absolute coordinates on a mechanism. Normally,
homing is done by controller, but it can also be done by the internal homing procedure of the servo drive.
The internal homing procedure will do motion planning for the motor in order to find the absolute
coordinates. In addition to the internal homing procedures in accordance with the design principle of
CiA402, the servo drive also provides several homing procedures defined by HIWIN. The internal homing
procedures can only be used in internal position mode or position mode.
8.11.1 Setting internal homing
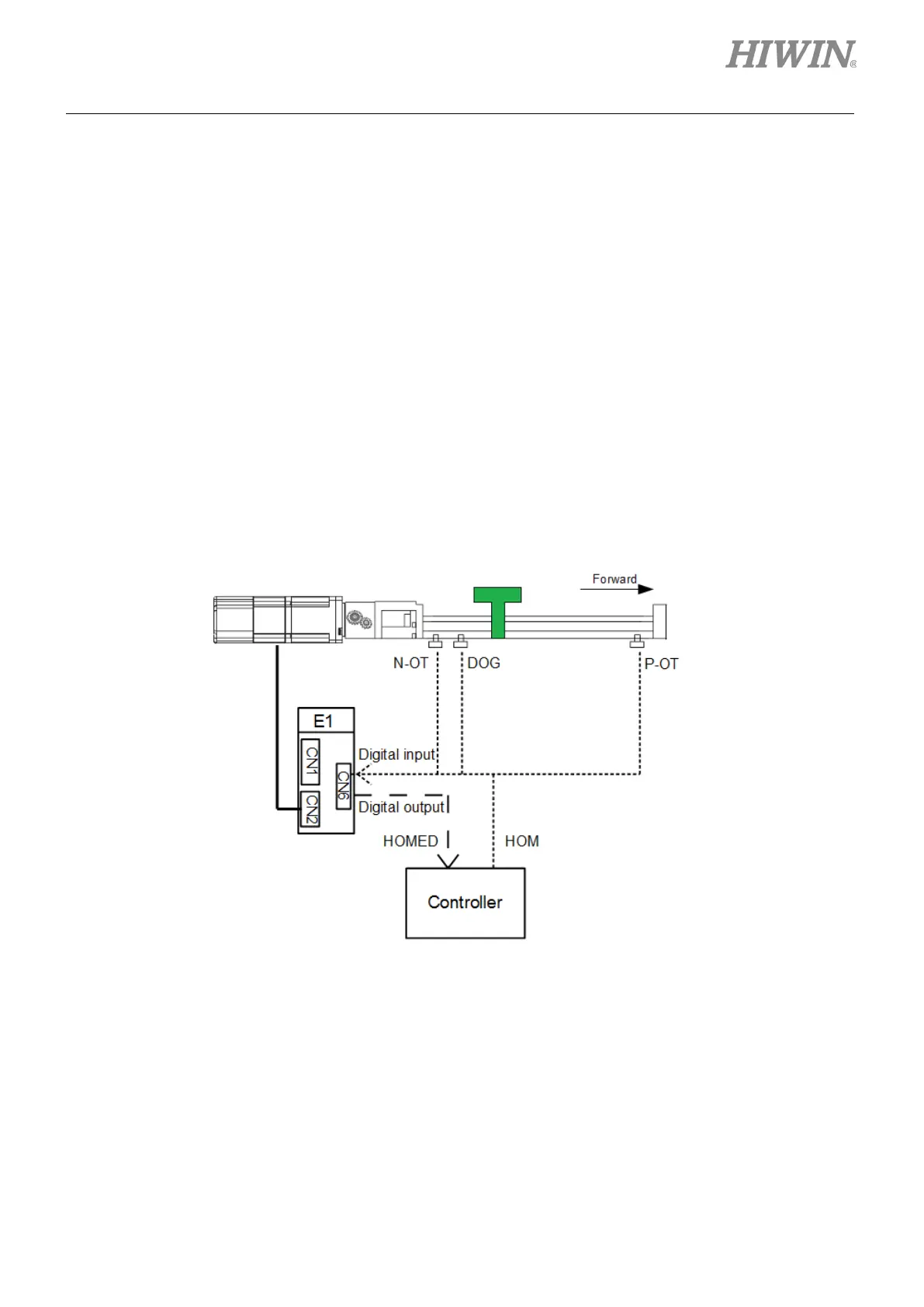
Allocate required input or output signals to the hardware pins according to the homing method in use. For
connecting to controller while using internal homing procedure, please refer to below.
Figure8.11.1.1 Connecting to controller while using internal homing procedure
Explanation of term
(1) The reference point of Z-phase signal: During homing, the motor moves at fast homing velocity
to search for the reference point of Z-phase signal. The reference point of Z-phase signal can
be reverse prohibition input (N-OT) signal, forward prohibition input (P-OT) signal, near home
sensor input (DOG) signal or hard stop.

 Loading...
Loading...


