E1 Series Servo Drive User Manual Parameters
HIWIN MIKROSYSTEM CORP. 15-3
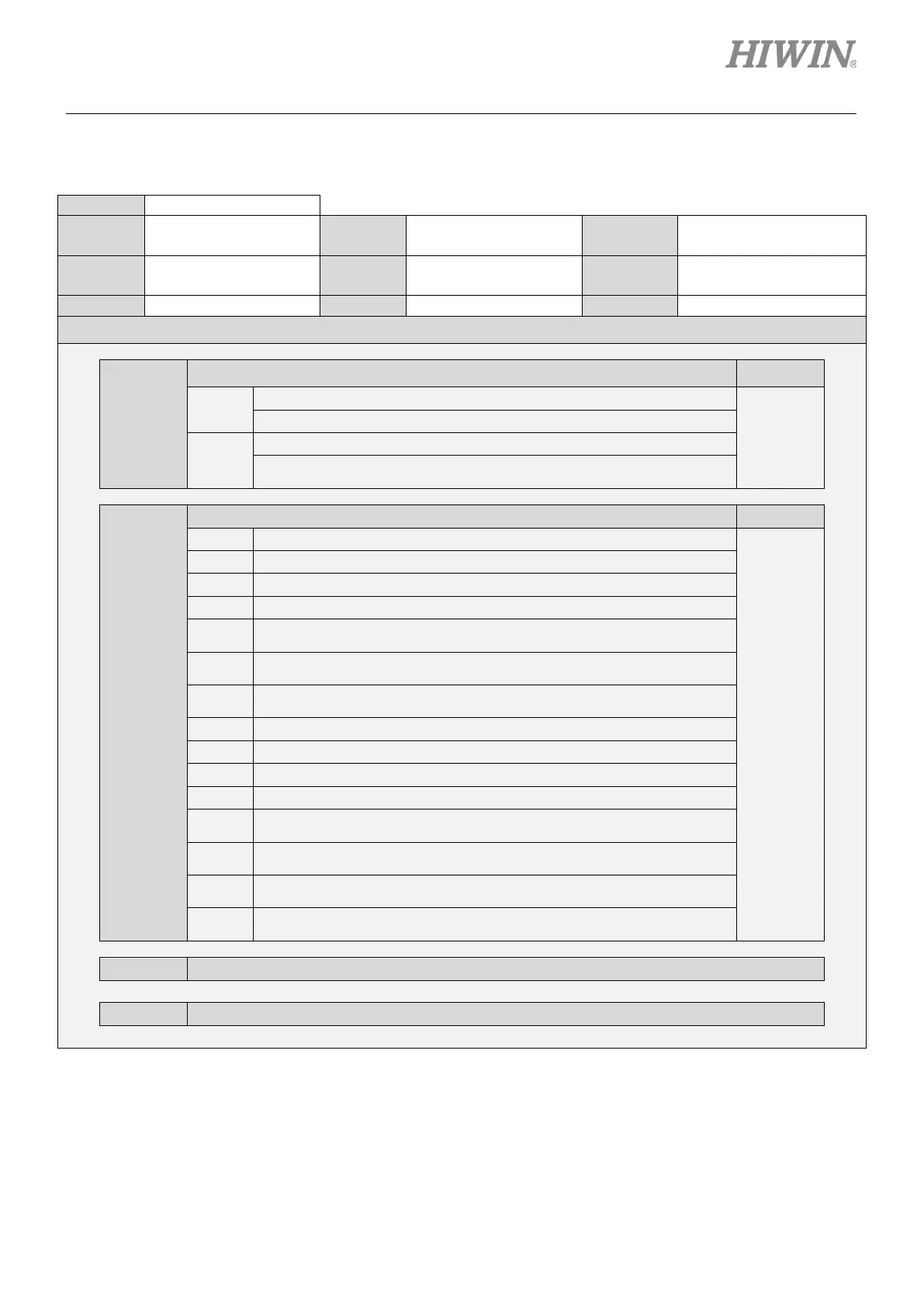
15.2 List of parameters
Size 2
0000~00E1 Default 0010
Name
Basic function
selection 0
Unit -
All
Description
t.X
Rotation/movement direction selection Reference
0
CCW is the forward direction.
-
The direction where the linear encoder counts up is the forward direction.
1
CW is the forward direction. (reverse mode)
The direction where the linear encoder counts down is the forward direction.
(reverse mode)
t.X
Control method selection Reference
0 Velocity mode (analog command)
-
1 Position mode (pulse command)
Torque mode (analog command)
3 Internal velocity mode (contact command)
4
Internal velocity mode (contact command)↔position mode (pulse
command)
5
Internal velocity mode (contact command)↔velocity mode (analog
command)
6
Internal velocity mode (contact command)↔torque mode (analog
command)
Position mode (pulse command)↔velocity mode (analog command)
8 Position mode (pulse command)↔torque mode (analog command)
9 Torque mode (analog command)↔velocity mode (analog command)
Internal position mode (contact command)
B
Internal position mode (contact command)↔position mode (pulse
command)
C
Internal position mode (contact command)↔velocity mode (analog
command)
D
Internal position mode (contact command)↔torque mode (analog
command)
E
Internal velocity mode (contact command)↔internal position mode (contact
command)
t.X Reserved (Do not modify.)
t.X Reserved (Do not modify.)

 Loading...
Loading...


