E1 Series Servo Drive User Manual Application Function
8-22 HIWIN MIKROSYSTEM CORP.
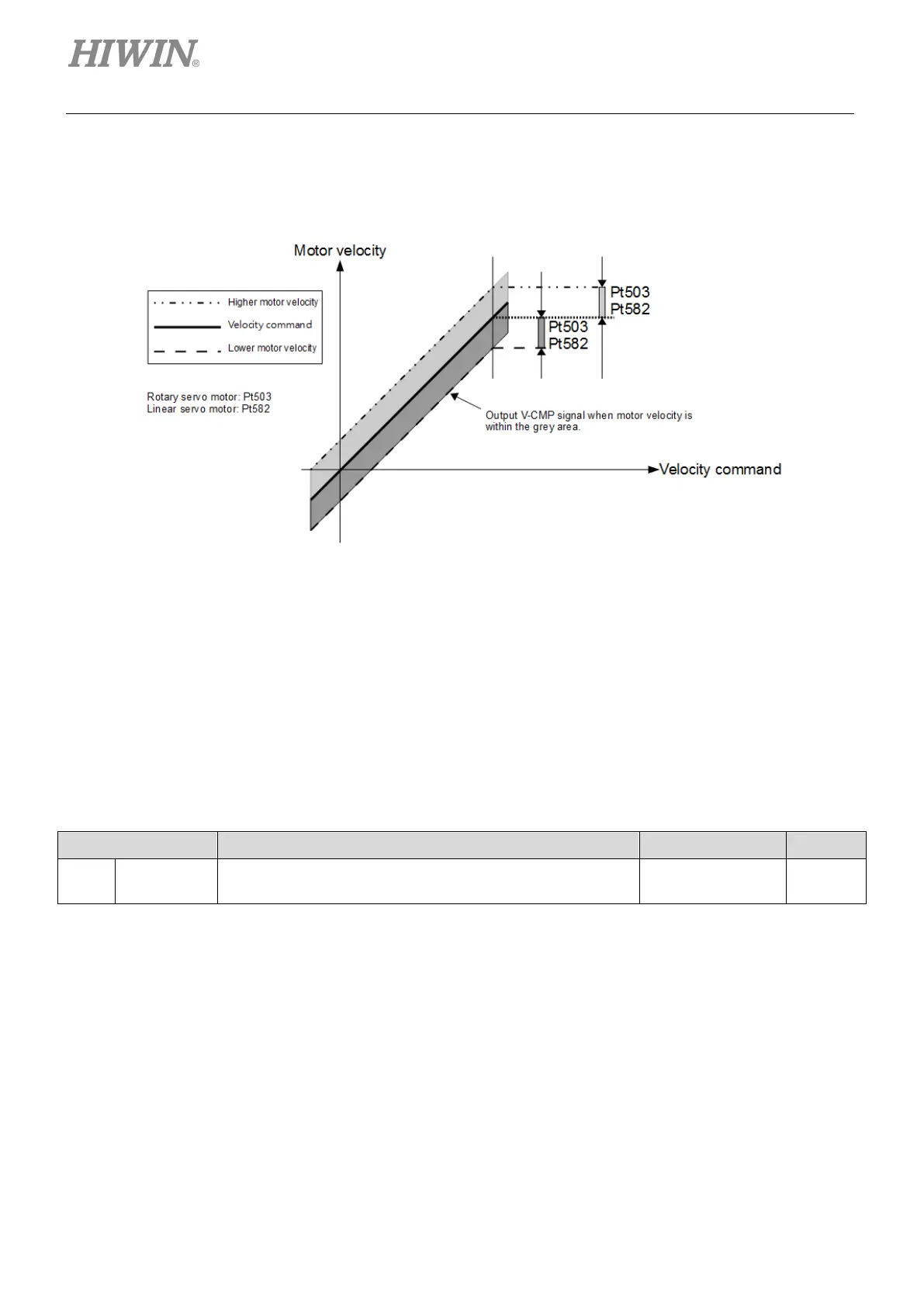
If Pt503 = 100 and the velocity command is 2000 rpm, V-CMP signal is output when the motor velocity is
1900~2100 rpm.
Figure8.3.6.1
8.4 Position mode
In position mode, motor position is controlled by pulse command. Motor position and velocity are
determined by the number of pulses and the inputting frequency of pulses. Set Pt000 to t.1 to select
position mode.
Table8.4.1
Parameter Description Effective Category
Pt000 t.1 Control mode: position mode After power on Setup

 Loading...
Loading...


