E1 Series Servo Drive User Manual Application Function
8-82 HIWIN MIKROSYSTEM CORP.
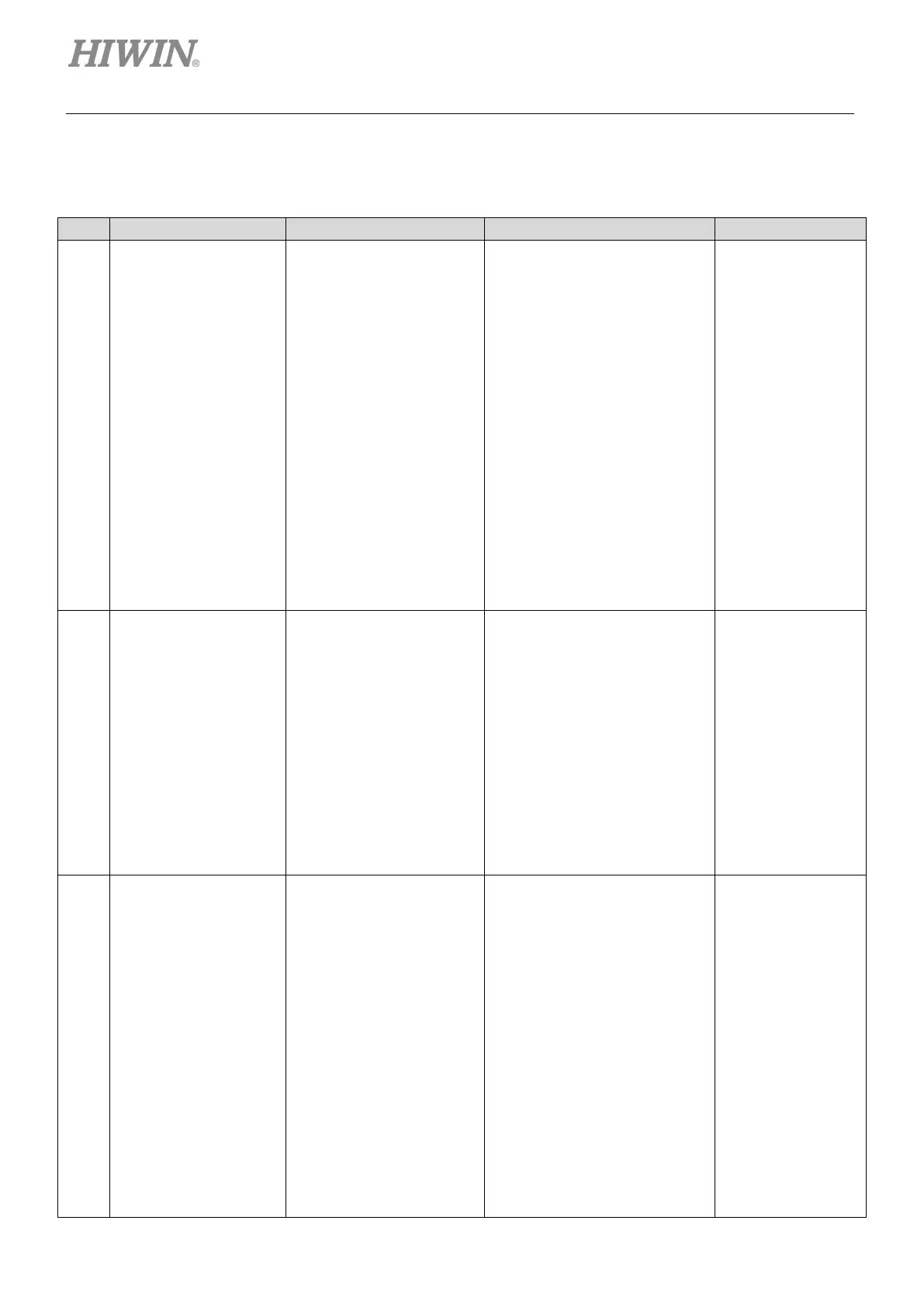
8.16.2 Operating procedure of full-closed loop control
Table8.16.2.1
1
semi-closed loop control
(Do not use external
encoder).
Items to check
Power supply circuit
wiring
Servo motor wiring
Encoder wiring
I/O signal wiring to the
controller
Rotation direction and
motor velocity of
servo motor
Protection function,
such as brake or
overtravel function is
normal.
the operation without load
is normal in semi-closed
loop control (Pt002 = t.0☐
☐☐
). Check the following
items.
The servo drive is
normal.
Use Test run in Thunder
to check if P2P motion is
normal.
I/O signals can be
ON/OFF normally.
Power has been supplied
to the servo motor after
servo on input (S-ON)
signal is input.
Input position command
from the controller to see
if the servo motor
Basic function selection 0
(Pt000)
Application function selection
1 (Pt001)
Usage of external encoder
(Pt002 = t.X☐☐☐)
Electronic gear ratio
(numerator, Pt20E)
Electronic gear ratio
(denominator, Pt210)
Input signal selection (Pt50A,
Pt50B, Pt511, Pt515, Pt516)
Output signal selection
(Pt50E, Pt50F, Pt510, Pt514,
Pt517)
Thunder first. Then
input position
command from the
controller.
2
semi-closed loop control
when the external load
and servo motor are
connected.
Items to check
The response after
the load is connected.
Input position
command from the
controller. Check the
moving direction,
moving distance and
moving velocity at the
Connect servo motor to the
machine. If you would like
to use auto tuning, please
disable tuneless function
(Pt170 = t.☐☐☐
0) first.
Check the moving direction,
moving distance and
moving velocity at the load
side are in accordance with
the command of the
controller.
Tuneless function selection
(Pt170)
Application function selection
1 (Pt001)
by Test run in
Thunder. Input
command from the
controller to check
the moving
direction, moving
distance and
moving velocity at
the load side.
3
encoder.
Item to check
Check if the external
encoder signal can be
received by the servo
drive normally.
full-closed loop control. Do
not enable the motor. Move
the load manually and
observe the following via
Thunder.
When the servo motor
moves in forward
direction, control unit
counts up.
Check if the moving
distance is correct after
one revolution.
Usage of external encoder
(Pt002 = t.X☐☐☐)
Feed length of external
encoder (Pt20A)
Linear unit length (resolution)
of external encoder (Pt20B)
Gear ratio at motor side
(full-closed loop) (Pt20C)
Gear ratio at load side
(full-closed loop) (Pt20D)
Electronic gear ratio
(numerator, Pt20E)
Electronic gear ratio
(denominator, Pt210)
Encoder output resolution
(Pt281)
Detection value for overflow
motor-load position deviation
(Pt51B)
Positioning completion width
N/A

 Loading...
Loading...


