E1 Series Servo Drive User Manual Trial Operation When Connected To Controller
HIWIN MIKROSYSTEM CORP. 9-3
While performing trial operation with controller, ensure the motor does not connected to load (The coupling or
belt is removed.) to avoid accident.
9.2 Trial operation for position mode
9.2.1 Operating procedure
The procedure of trial operation with controller for position mode is provided as below.
Step 1: The controller stops inputting S-ON signal. The servo drive becomes servo OFF.
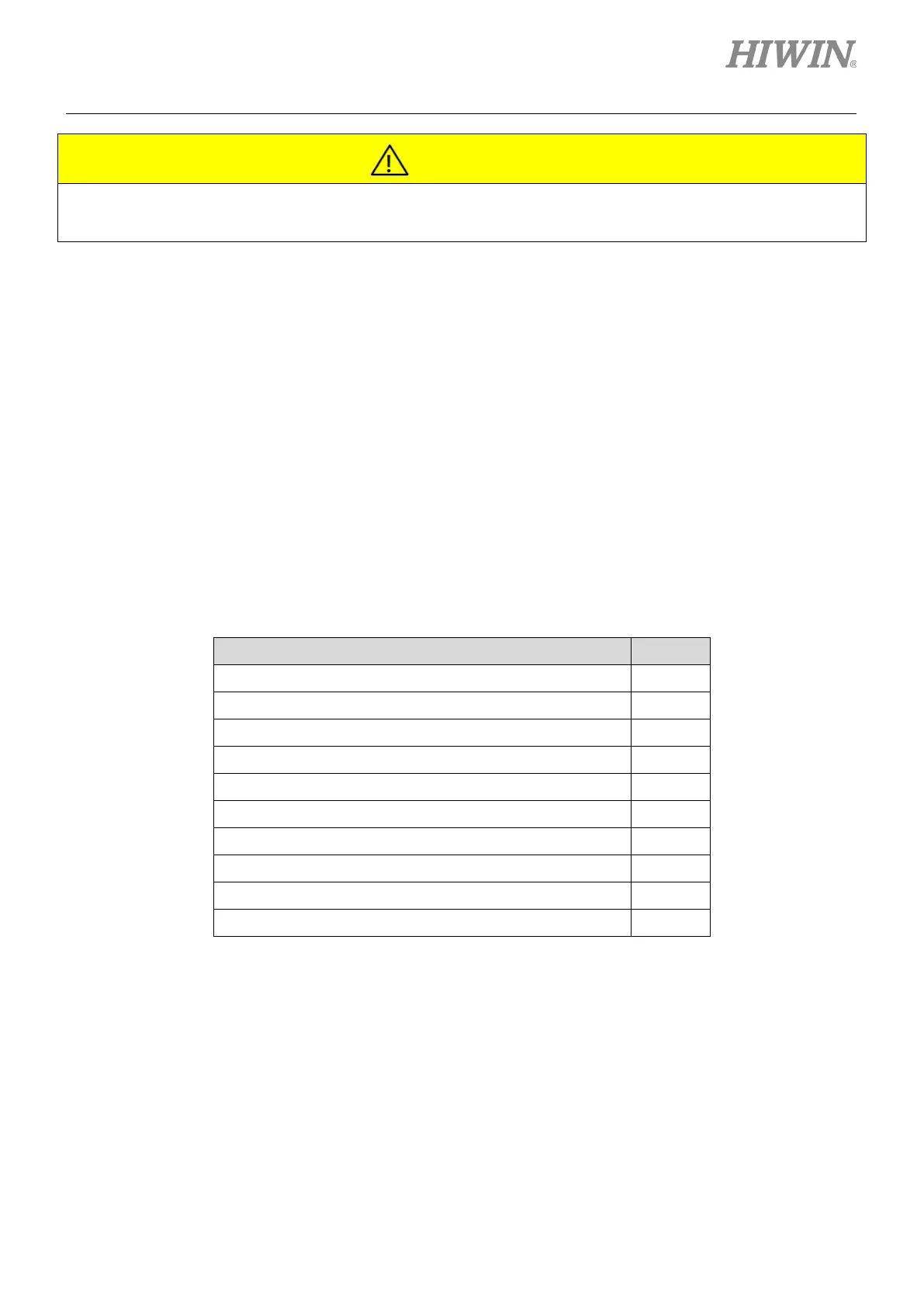
Step 2: Check the settings and states of input signals. The basic signals used in position mode are
listed in table 9.2.1.1. The configuration can be user-defined.
Table9.2.1.1
Signal State
Servo on input (S-ON) signal OFF
Proportional control input (P-CON) signal OFF
Forward prohibition input (P-OT) signal OFF
Reverse prohibition input (N-OT) signal OFF
Alarm reset input (ALM-RST) signal OFF
Forward external torque limit input (P-CL) signal OFF
Reverse external torque limit input (N-CL) signal OFF
Servo drive built-in homing procedure input (HOM) signal OFF
Servo drive error map input (MAP) signal OFF
Forced stop input (FSTP) signal OFF
Step 3: Manually move the load to where the positive and negative limit switches (P-OT and N-OT)
locate to ensure the signals and settings are correct.
Step 4: Use Pt200 = t.
X (Pulse command form) to select the pulse type of the controller.
Step 5: Set electronic gear ratio (Pt20E and Pt210) according to the control unit of the controller.
Step 6: Write parameters to the servo drive and turn on the power of the servo drive again.
Step 7: Input S-ON signal from the controller. The servo drive becomes servo ON.

 Loading...
Loading...


