E1 Series Servo Drive User Manual Application Function
8-18 HIWIN MIKROSYSTEM CORP.
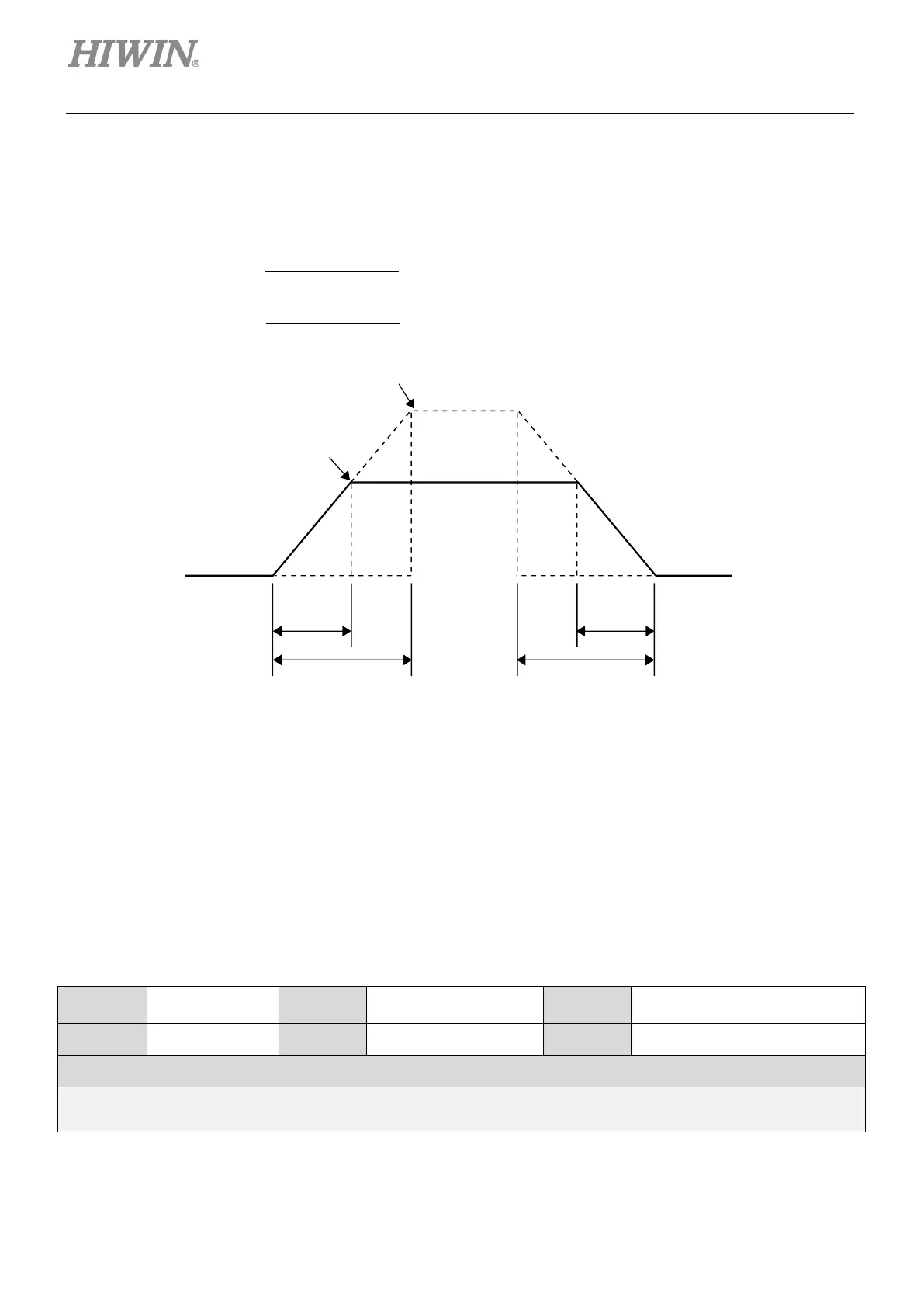
Pt305: The required time for the motor to accelerate from stop to its maximum velocity.
Pt306: The required time for the motor to decelerate from its maximum velocity to stop.
The calculations of the actual acceleration time and deceleration time are:
Actual acceleration time =
Target velocity
Maximum velocity
× Soft start acceleration time (Pt305)
Actual deceleration time =
Target velocity
Maximum velocity
× Soft start deceleration time(Pt306)
Figure8.3.3.1
8.3.4 Velocity command filter
Velocity command filter is used for velocity command input signal (V-REF). Velocity command becomes
smoother after velocity command filter is applied. The higher the setting value is, the smoother the
velocity command becomes. If the setting value is too large, the response of velocity command
decreases.
Table8.3.4.1
Parameter Pt307 Range 0~65535
Position mode, velocity mode
and torque mode
Default 40 Effective Immediately Unit 0.01 ms
Description
Set velocity command filter time constant.
Maximum velocity
Target velocity
Actual
acceleration
time
Actual
deceleration
time
Pt305 Pt306

 Loading...
Loading...


