E1 Series Servo Drive User Manual Safety Function
HIWIN MIKROSYSTEM CORP. 12-7
12.2.8 Motor stopping method for STO safety function
When SF1 and SF2 signals are OFF and STO safety function is enabled, the servo motor will stop
according to the setting of stopping method for servo off and Gr.A alarm (Pt001 = t.X). Pay attention
to the following, when motor is stopped by dynamic brake (Pt001 = t.0 or t.1).
Since dynamic brake and STO safety function operate independently, while designing your system, ensure
even when the motor runs freely in STO state, there will be no danger.
In application that STO safety function is frequently applied, stopping the motor by dynamic brake could
deteriorate the internal components of the servo drive. To avoid deteriorating the internal components of the
servo drive, the motor must be stopped before going into STO state.
12.3 External device monitoring output (EDM) signal
External device monitoring output (EDM) signal is used to monitor if STO safety function malfunctions.
Connect it as a feedback signal to safety module.
External device monitoring output (EDM) signal
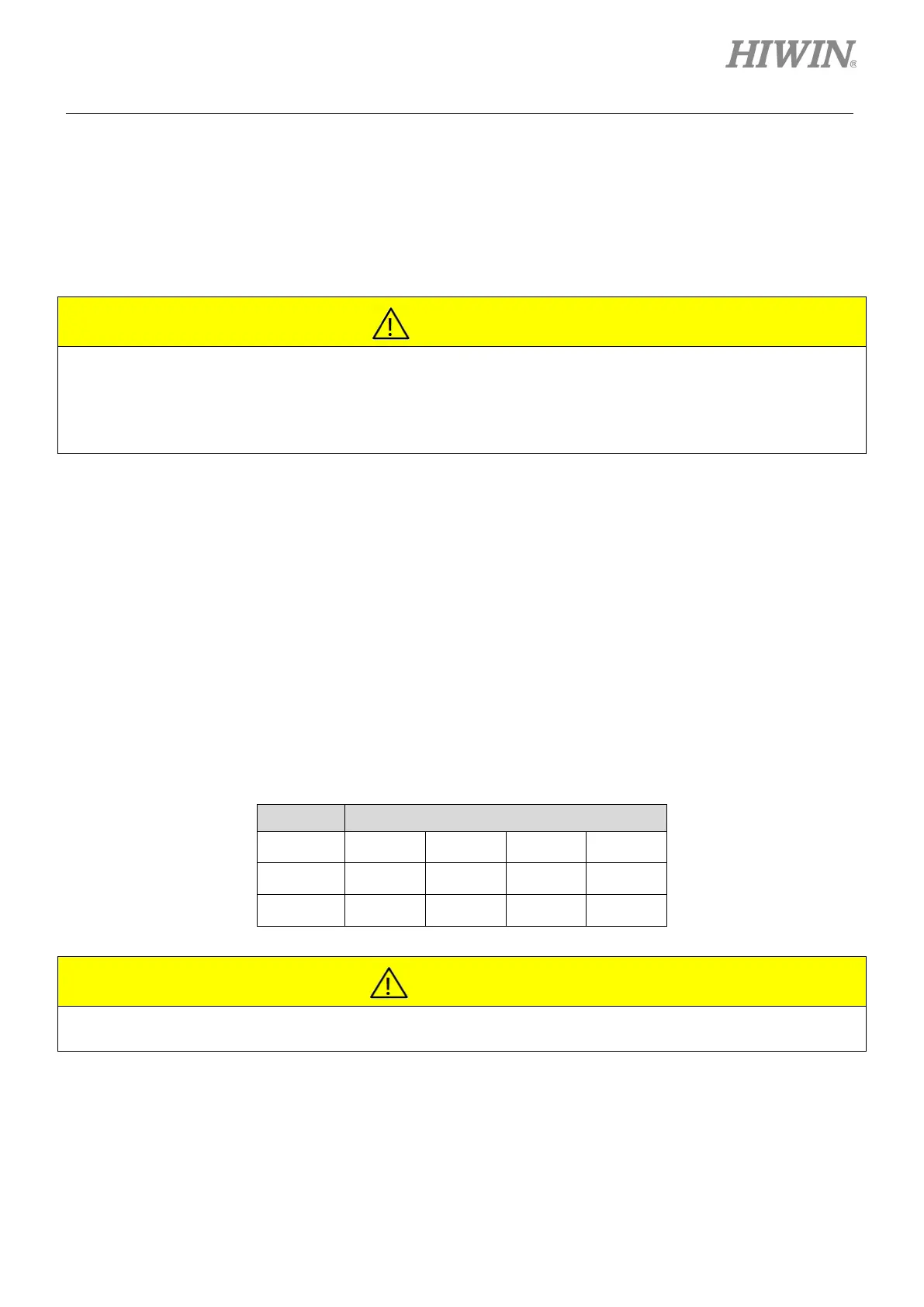
The relationship of EDM, SF1 and SF2 signals are shown in table 12.3.1. EDM signal is used to
monitor if SF1 or SF2 signal malfunctions.
Table12.3.1
Signal Logic
SF1 ON ON OFF OFF
SF2 ON OFF ON OFF
EDM OFF OFF OFF ON
EDM signal is not a safety output signal. It can only be used for monitoring malfunction.

 Loading...
Loading...


