E1 Series Servo Drive User Manual Basic Function Settings Before Operation
6-10 HIWIN MIKROSYSTEM CORP.
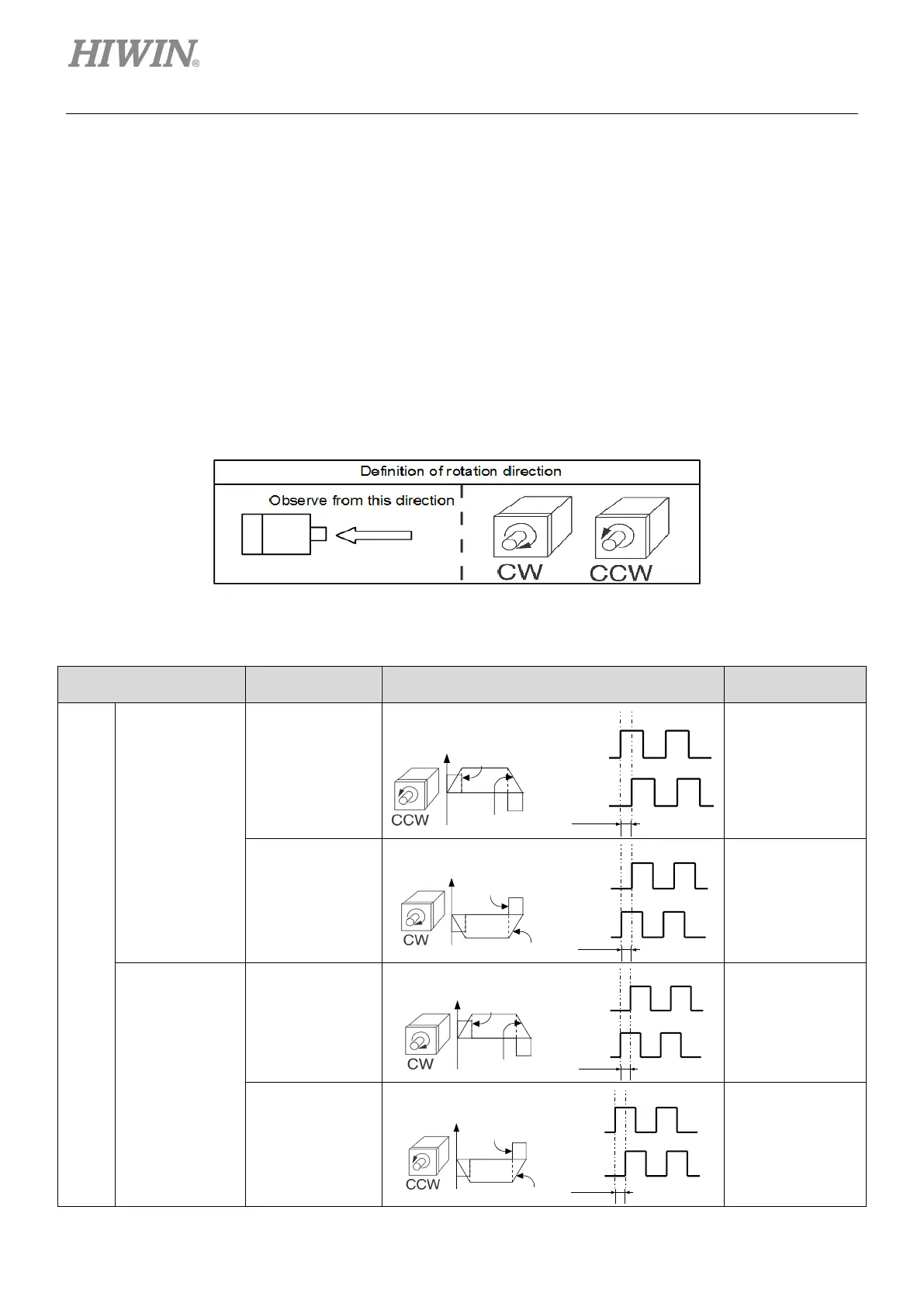
6.6 Setting the moving direction of motor
When the actual moving direction of the motor is different from the command from the controller, users
can change the moving direction by Pt000 = t.X without changing the polarity of velocity command
or position command. Though the moving direction will be changed, the relationship between A phase
and B phase of encoder pulse output will remain the same. For more information of encoder pulse output,
please refer to section 8.6.
Rotary motor
The default forward direction is that while observing from the load side of the servo motor,
counterclockwise direction is the forward direction.
Figure6.6.1
Table6.6.1
Parameter
Moving Direction And
Encoder Pulse Output Signal
Pt000
t.0
CCW is the
forward
direction
(Default)
Forward
command
Forward
prohibition input
(P-OT) signal
Reverse
command
Reverse
prohibition input
(N-OT) signal
t.1
CW is the
forward
direction.
(Reverse mode)
Forward
command
Forward
prohibition input
(P-OT) signal
Reverse
command
Reverse
prohibition input
(N-OT) signal
+
Torque command
Motor velocity
Time
A phase
B phase
Phase 90 degrees
Forward
+
Time
Torque command
Motor velocity
A phase
B phase
Phase90 degrees
Reverse
+
Torque command
Motor velocity
Time
A phase
B phase
Phase90 degrees
Reverse
+
Time
Torque command
Motor velocity
A phase
B phase
Phase 90 degrees
Forward

 Loading...
Loading...


