E1 Series Servo Drive User Manual Application Function
8-70 HIWIN MIKROSYSTEM CORP.
8.11.3 Using internal homing procedure with controller
The internal homing procedure is used to assist controller in finding the absolute coordinates on a
mechanism. The controller only needs to trigger the internal homing procedure by inputting servo drive
built-in homing procedure input (HOM) signal.
After the homing procedure completes, servo drive homing completion output (HOMED) signal is output.
Then the controller can proceed to the next motion planning. If the internal homing procedure fails or
exceeds the time limit, it is regarded as homing failure, please check the velocity setting of the motor or
the sensor for external input signal.
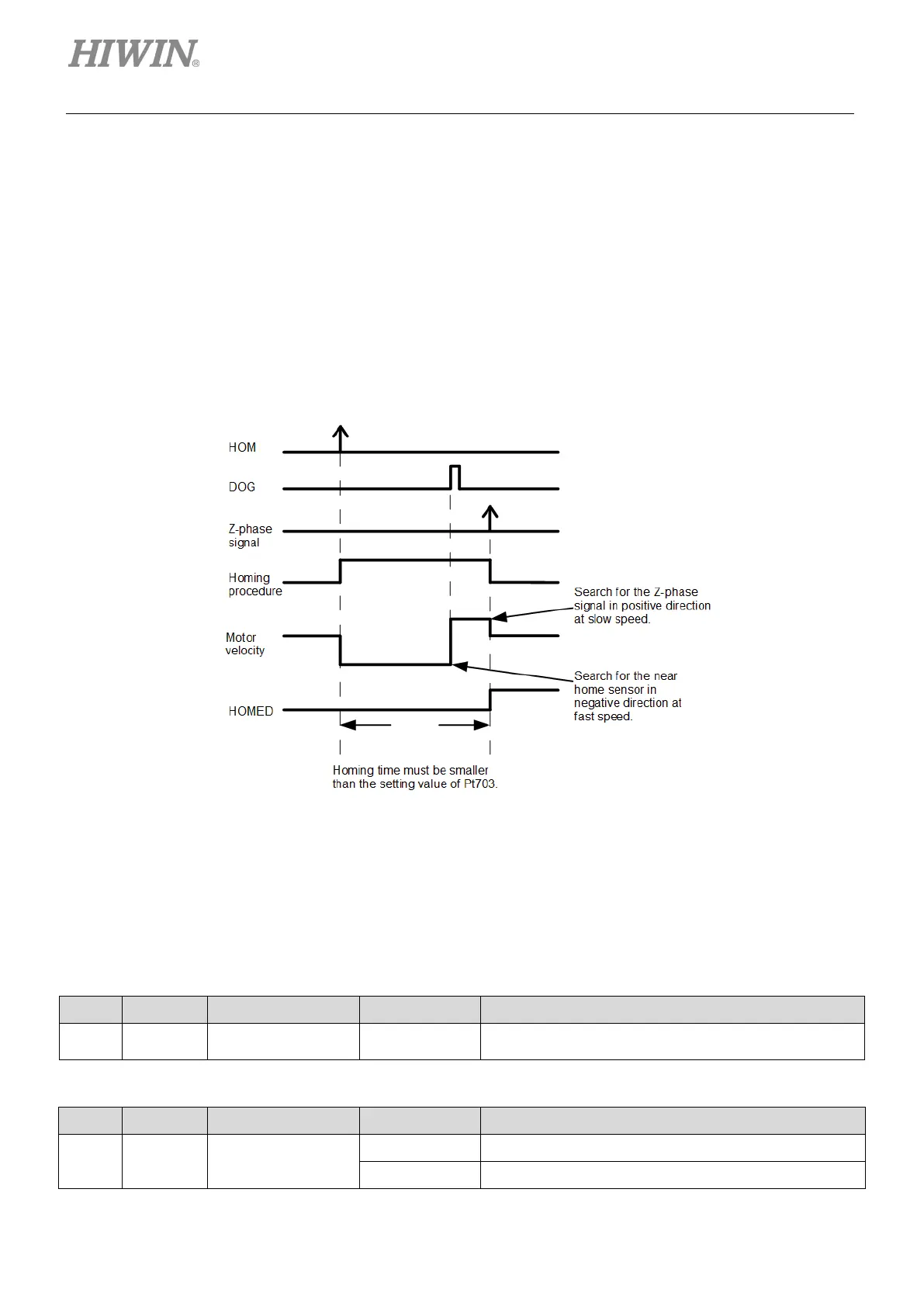
Figure8.11.3.1 Timing diagram while using the internal procedure with controller
Note:
If the internal homing procedure fails, the servo drive does not output servo drive homing completion output
(HOMED) signal. Controller must have a timer to measure the execution time of the internal homing procedure. If the
execution time is too long, it is regarded as homing failure.
Table8.11.3.1
Type Signal Hardware Pin Status Description
Input HOM
Edge-triggered Enable the internal homing procedure.
Table8.11.3.2
Type Signal Hardware Pin Status Description
Output HOMED User-defined
ON Homing completes.
OFF Homing does not complete.

 Loading...
Loading...


