E1 Series Servo Drive User Manual Application Function
HIWIN MIKROSYSTEM CORP. 8-43
8.7.1 Setting internal position mode
Rotary motor
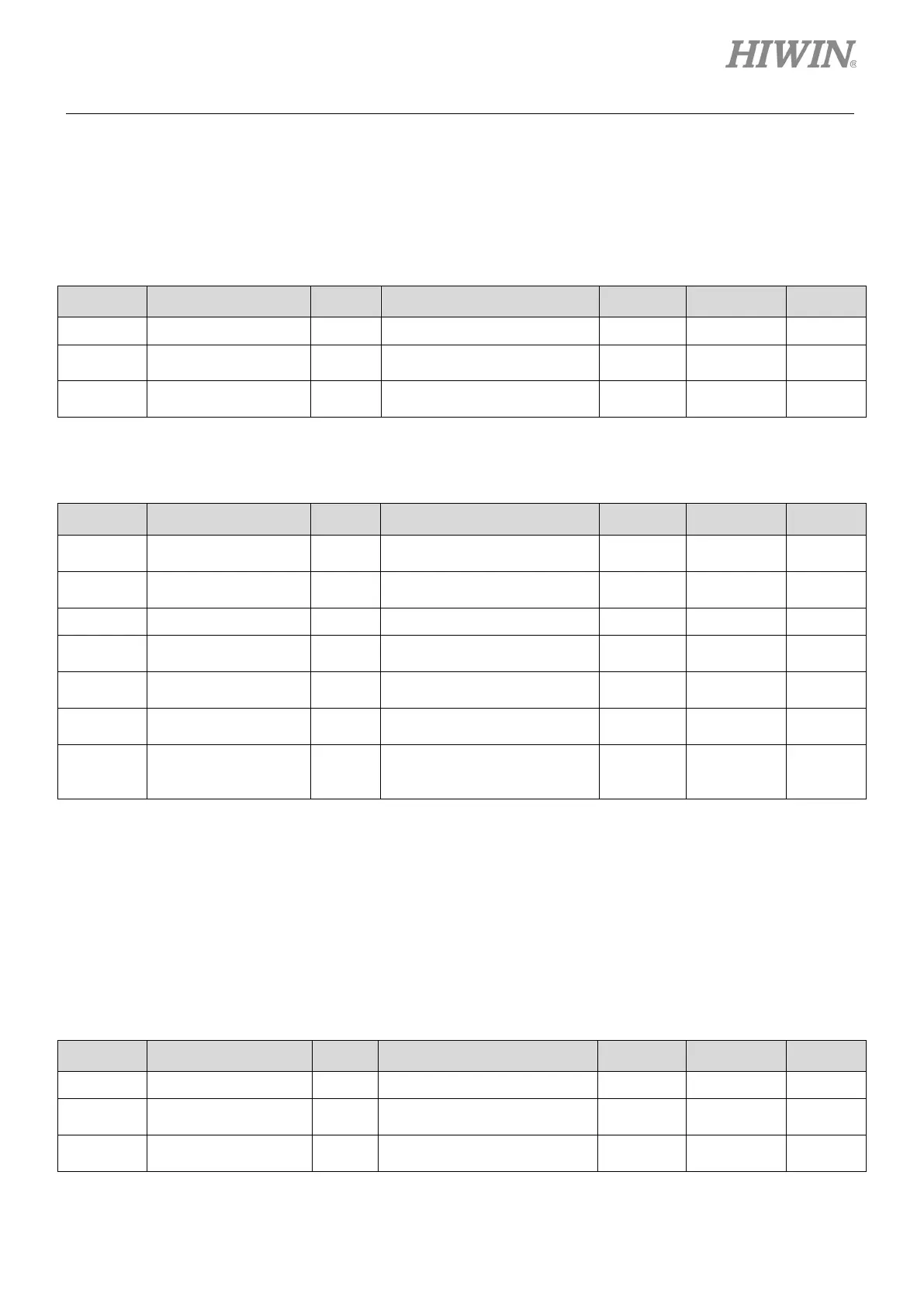
(1) Setting for trial operation (JOG)
Table8.7.1.1
Parameter Description Default Range Unit Effective Category
Pt304 Jog velocity 600/60* 0~10000 1 rpm Immediately Setup
Pt305
Soft start
acceleration time
0 0~10000 1 ms Immediately Setup
Pt306
Soft start
deceleration time
0 0~10000 1 ms Immediately Setup
(2) Setting for trial operation (P2P)
Table8.7.1.2
Parameter Description Default Range Unit Effective Category
Pt531
Program jog travel
distance P1
0
-1073741824~1073741822
Immediately Setup
Pt532
Program jog travel
distance P2
32768
-1073741823~1073741823
Immediately Setup
Pt533 Program jog velocity 600/60* 1~10000 1 rpm Immediately Setup
Pt534
Program jog
acceleration time
100 2~10000 1 ms Immediately Setup
Pt535
1000 0~60000 1 ms Immediately Setup
Pt537
Program jog
deceleration time
100 2~10000 1 ms Immediately Setup
Pt538
emergency
10 2~1000 1 ms Immediately Setup
Note:
(1) Pt532 must be always larger than Pt531. If Pt531 is set to 100 control units and Pt532 is set to 99 control units,
Pt532 will be forcibly modified to 101 control units.
(2) *While using direct drive motor, the default values of Pt304 and Pt533 are set to 60 rpm.
Linear motor
(1) Setting for trial operation (JOG)
Table8.7.1.3
Parameter Description Default Range Unit Effective Category
Pt383 Jog velocity 50 0~10000 1 mm/s Immediately Setup
Pt305
Soft start
acceleration time
0 0~10000 1 ms Immediately Setup
Pt306
Soft start
deceleration time
0 0~10000 1 ms Immediately Setup

 Loading...
Loading...


