E1 Series Servo Drive User Manual Tuning
HIWIN MIKROSYSTEM CORP. 10-17
Velocity loop gain
Pt100 defines the response of velocity loop. Poor response in velocity loop leads to poor response in
position loop. Due to this, overshoot may occur or velocity becomes stable slowly. Therefore, within
the range that does not cause vibration, increase the setting value of velocity loop gain as much as
possible to have better response.
Table10.6.2.4
Parameter Pt100 Range 10 ~ 20000
Position mode and velocity
mode
Default 400 Effective Immediately Unit 0.1 Hz
Description
Velocity loop gain
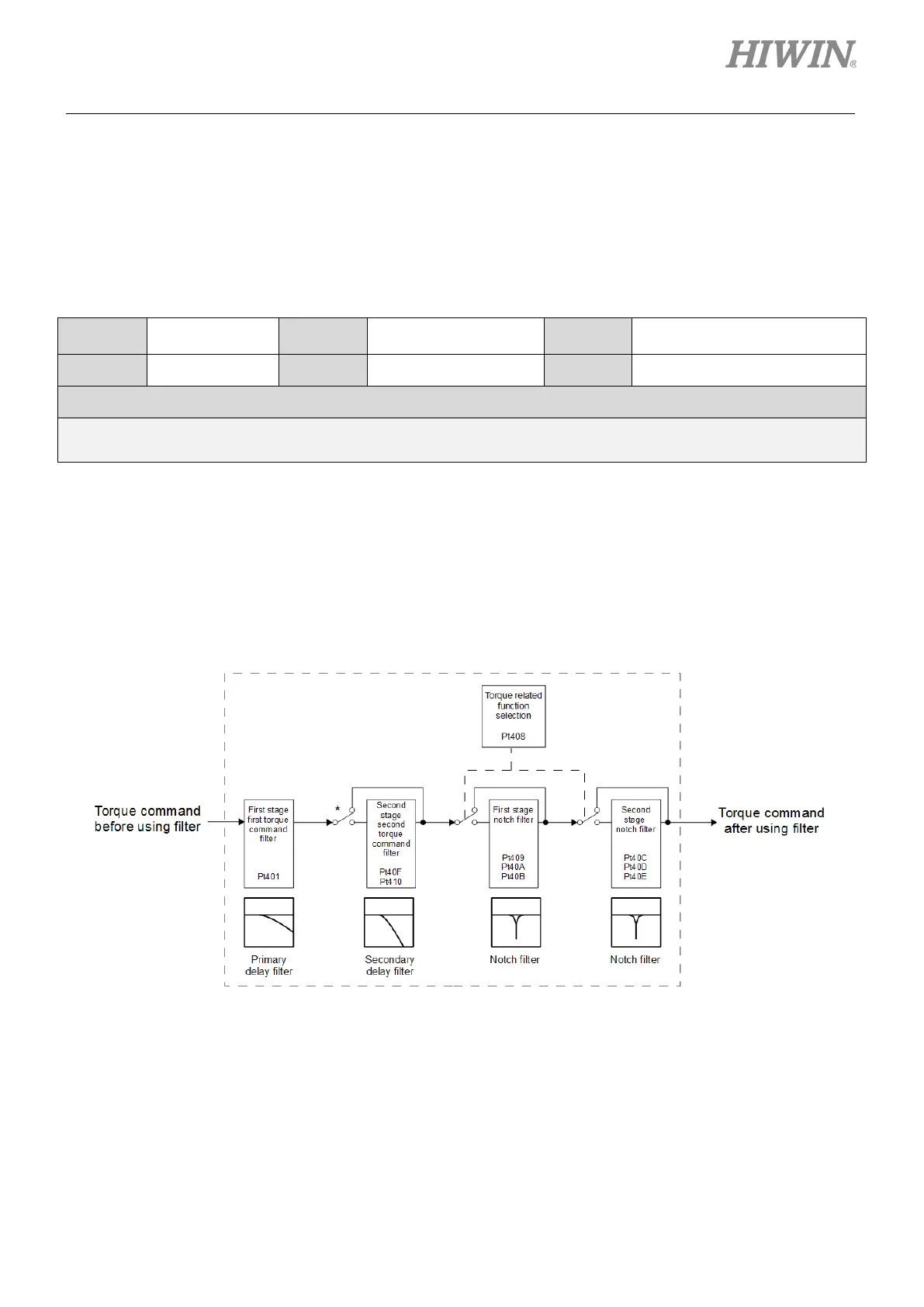
10.6.3 Torque command filter
E1 series servo drive provides delay filters and notch filters shown in figure 10.6.3.1 for torque command.
Each filter operates independently. Use Pt408 = t.X and t.X to disable or enable notch filter.
Figure10.6.3.1 Torque command filter
Note:
Second stage second torque command filter has no function when Pt40F = 5000 (Default). To use second stage
second torque command filter, let Pt40F<5000.

 Loading...
Loading...


