E1 Series Servo Drive User Manual Monitoring
11-4 HIWIN MIKROSYSTEM CORP.
11.3 Monitoring physical quantity and servo status
11.3.1 Monitoring physical quantity
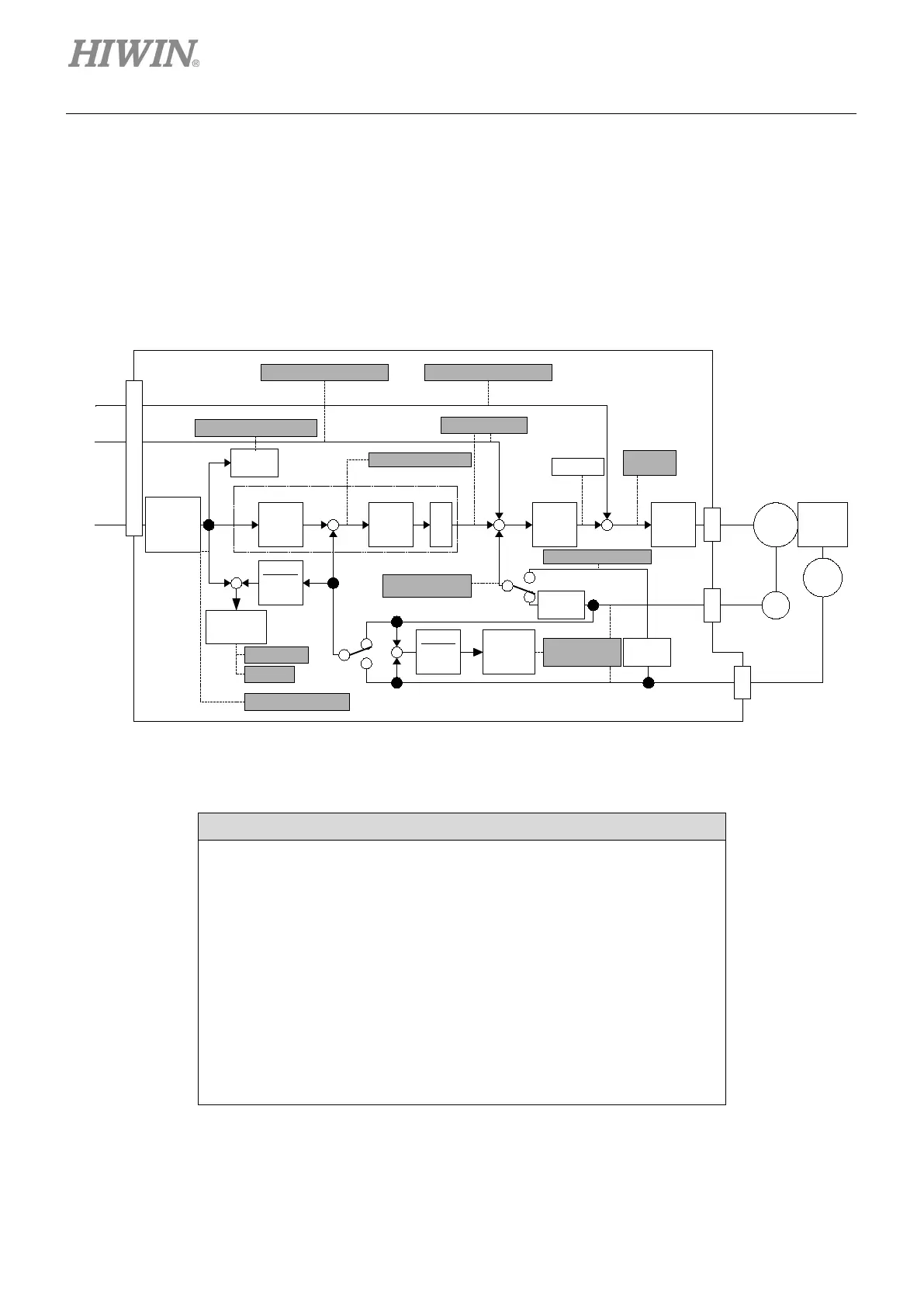
The physical quantities which can be monitored are shown in the grey boxes in figure 11.3.1.1 and listed
in table 11.3.1.1.
Figure11.3.1.1 Monitoring physical quantity
Table11.3.1.1 Physical quantities which can be monitored
Physical Quantity
(2) In position
(3) Run position command
(4) Position amplifier error
(5) Position reference speed
(6) Motor-Load position deviation
(7) Velocity feedforward
(8) Reference velocity
(9) Motor velocity
(10) Torque feedforward
(11) Torque reference
(12) Command current
Pulse
command
input
magnification
╳
n
Electronic
gear
Deviation
counter
Kp
Velocity
loop
Current
loop
Electronic
gear
1
LoadM
ENC
External
ENC
C
N
2
C
N
7
C
N
7
Speed
conversion
Deviation
counter
Deviation
counter
Speed
conversion
Speed
conversion
1
Position loop
Position error
In position
Run position command
Motor velocity
Motor-Load
position deviation
External encoder speed
Position amplifier error
速度指令
Position reference velocity
C
N
6
Reference velocity
Valid gain
Torque
reference
T-REF
V-REF
PULS
SIGN
Servo drive
Velocity feedforward Torque feedforward
( U/V/W )
Full-closed loop*
*
*
*
+ ++
+
+
-
-
-
+ +
-
Electronic
gear

 Loading...
Loading...


