E1 Series Servo Drive User Manual Tuning
10-8 HIWIN MIKROSYSTEM CORP.
10.3.4 Ineffective parameters while executing tuneless function
The parameters which cannot be used when tuneless function is enabled (Pt170 = t. 1) (Default)
are listed in table 10.3.4.1.
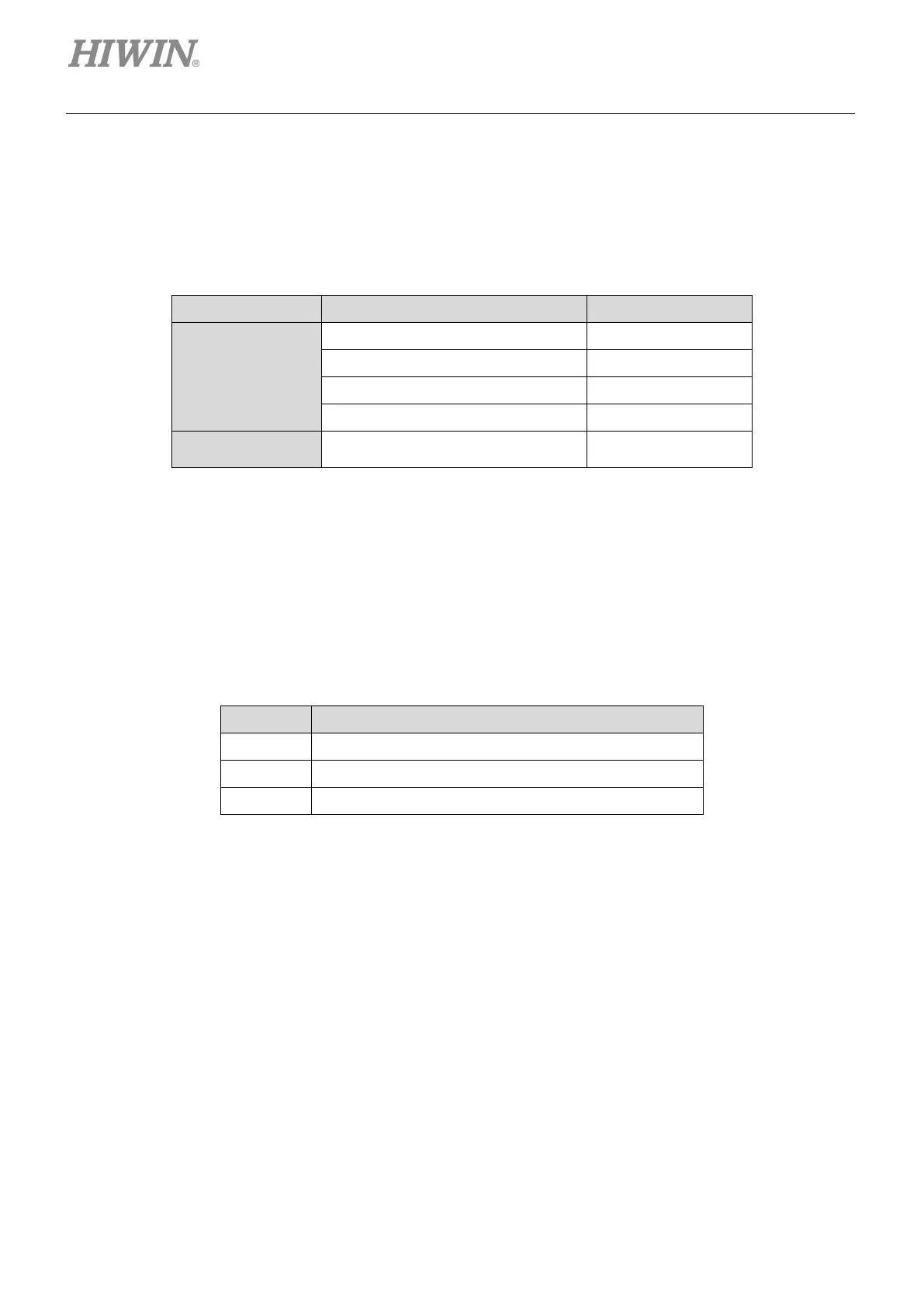
Table10.3.4.1
Item Parameter Name Parameter Number
Gain-related
Velocity loop gain Pt100
Velocity loop integral time constant Pt101
Position loop gain Pt102
Moment of inertia ratio Pt103
Gain switching
(Not supported yet)
Gain switching selection Pt139 = t.X
10.3.5 Related parameters of tuneless function
The parameters listed in table 10.3.5.1 will be automatically adjusted while executing tuneless function.
Do not modify the parameters after tuneless function is enabled.
Table10.3.5.1
Parameter Parameter Name
Pt401 First stage first torque command filter time constant
Pt40F Second stage second torque command filter frequency
Pt410 Second stage second torque command filter Q value
10.4 Auto tuning
10.4.1 Overview
In auto tuning, the servo drive automatically adjusts control loops without receiving commands from the
controller. During the process, parameters will be adjusted according to mechanical characteristics.
The items of auto tuning
(1) Gain: velocity loop gain, position loop gain and moment of inertia ratio
(2) Filter: torque command filter and notch filter

 Loading...
Loading...


