44x/EN AP/Hb6
-22 MiCOM P40 Agile
Confirmation
Phase selection
Directional decision
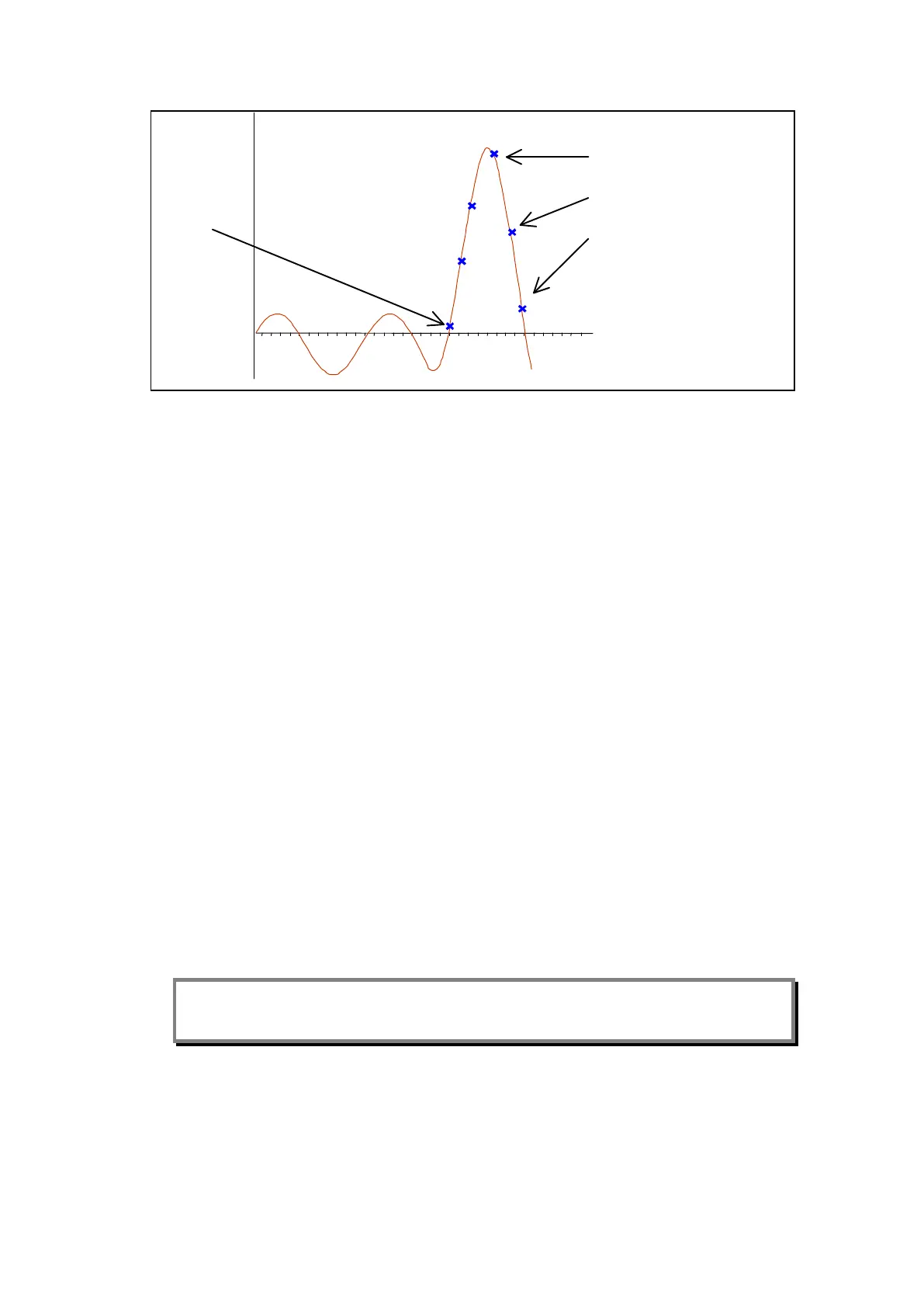
P3036ENa
Start
Figure 7: Deltas algorithms
High speed algorithms are used only during the first 2 cycles following a fault detection.
2.3 "Conventional" Algorithms
These algorithms do not use the superimposed values but use the impedance values
measured under fault conditions. They are based on fault distance and resistance
measurements.
They are used in the following circumstances:
• The condition before the fault could not be modelled.
• The superimposed values are not exclusively generated by the fault.
This may be true if the following occurs:
• A circuit breaker closing occurs during a fault. For SOTF, only the Conventional
Algorithms can be used as there are not 2 cycles of healthy network stored.
• The fault is not recent and so the operating conditions of the generators have
changed, or corrective action has been taken, that is, opening the circuit breakers.
This occurs generally after the first trip. High Speed algorithms are used only during
the first 2 cycles after the fault detection.
• operating conditions are not linear.
The conventional algorithms are also suited to detect low current faults that do not have the
required changes in current and voltage for the "high-speed" (superimposed) algorithms.
Therefore, their use assures improved coverage.
The "Conventional" algorithms run continuously with "high-speed" algorithms. If the "high
speed" algorithms cannot declare faulted phase(s) and direction, the conventional algorithms
will.
Note: The distance measurement of the fault is taken on the loop selected by the "Delta" or
"conventional" phase selection algorithms. This measurement uses the fault values
which are computed by Gauss Seidel method.
 Loading...
Loading...









