Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 114
5 Motor control & motor settings
5.10 Synchronous motor (SM): Pole position identification
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Optional settings (starting performance)
Optionally, a PLI without motion can be activated after switching on the i700 servo inverter.
0x2C63 | 0x3463 - pole position identification PLI (without movement)
Danger!
Each pole position identification causes an update of the pole position set in the device!
Therefore, ensure that the response to open circuit in the feedback system is set to Lenze
setting "1: Fault" in 0x2C45
(or 0x3445 for axis B)!
Otherwise, the status of the feedback system in case of open circuit is undefined and the
pole position can assume any values. There is a danger that the machine accelerates in
an uncontrolled way after pole position identification!
Note!
The process of the pole position identification only lasts some milliseconds. During the
pole position identification, the device status does not change. Only after the pole
position identification, the "Switched on
" device status changes to the "Operation
enabled" device status.
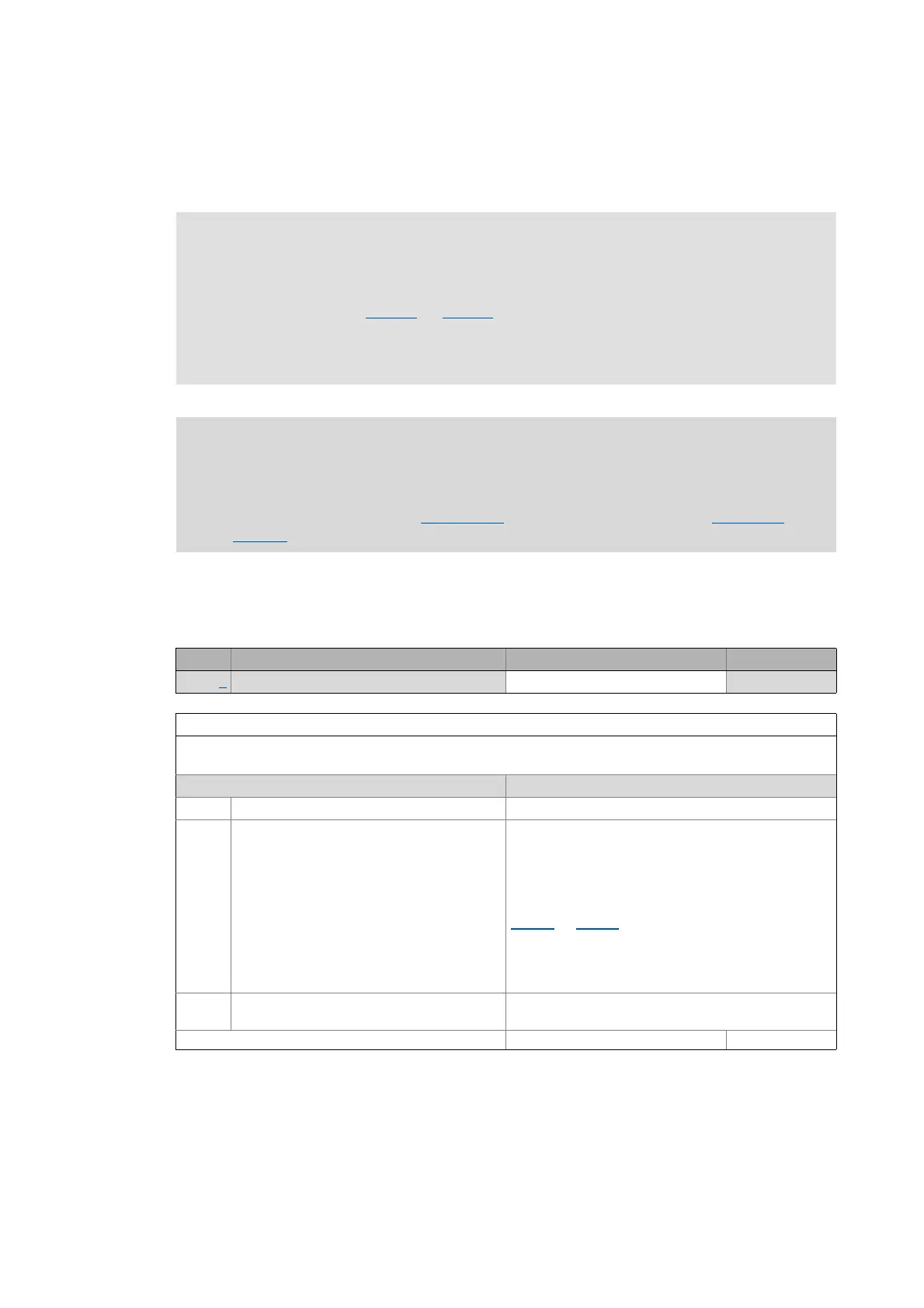
From version 01.05
Sub. Name Lenze setting Data type
1 Behaviour after switch-on 0: No operation UNSIGNED_8
Subindex 1: Behaviour after switch-on
Starting performance (without or with PLI before starting) in case of synchronous motor (SM) servo control
• In case of all other control modes, the setting has no influence.
Selection list (Lenze setting printed in bold) Info
0No Operation In the Lenze setting, the behaviour is the same as before.
1 PPI at initial switch-on and after encoder error
only
After the first controller enable and after each encoder
wire breakage, a PLI without movement takes place.
Note:
In order that the PLI is executed after each encoder open
circuit, the response to open circuit in the feedback
system has to be set to the Lenze setting "1: Fault" in
0x2C45
(or 0x3445 for axis B). Otherwise, the status of
the feedback system in case of open circuit is undefined
and the pole position can assume any values. There is a
danger that the machine accelerates in an uncontrolled
way after pole position identification!
2 PPI after every switch-on After every controller enable, a PLI without movement is
carried out in advance.
Write access CINH OSC P RX TX UNSIGNED_8

 Loading...
Loading...






