5 Motor control & motor settings
5.11 Setting control loops
121
Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.11.2 Determining the total moment of inertia
The total moment of inertia is composed as follows:
For determining the total moment of inertia, the i700 servo inverter is triggered by the higher-level
Controller and a test path (motion profile) is executed. After a mathematical procedure, the total
mass moment of inertia is determined from the detected speed and torque characteristics. The load
moment of inertia results from the difference between the total moment of inertia and the
moment of inertia of the motor (techn. data of the motor).
For determining the other moments of inertia (J
Gearbox
+J
Load
), there are the following options:
• Extraction from the rated data of the drive dimensioning
• Determination based on data sheets of the components
• Calculation/estimation (for simple kinematic arrangements)
• Empirical determination by test mode with trapezoidal motion profile
For the calculation, you can use e.g. the new Lenze app "Formulae and tables".
Tip!
The "Formulae and tables" app for smartphones can be found in the internet:
http://www.lenze.com
Download
The "Formulae and tables" app contains basic formulae of kinematics, dynamics and force
and torques as well as work, power, energy and control engineering and can be filled with
data at any time.
The sum of the set moments of inertia (J
Motor
+J
Gearbox
+J
Load
) forms the basis for an initial
calculation of the speed controller gain with the "Speed controller: Calculate controller parameters"
(0x2822
or 0x3022 = 5).
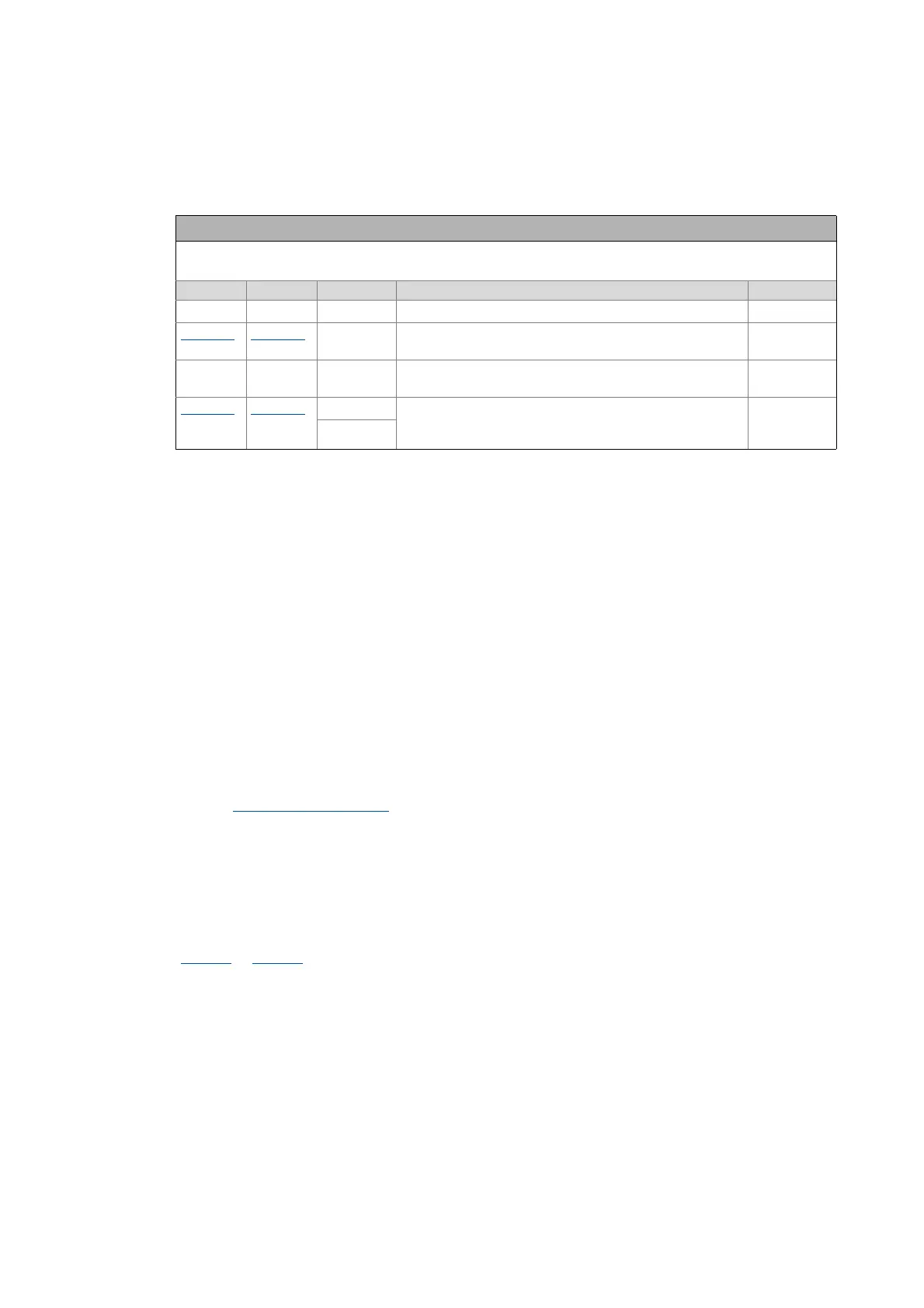
Equation for calculating the total moment of inertia
Axis A Axis B Symbol Description Dimension unit
-- J
total
Total moment of inertia kg m
2
0x2910:1 0x3110:1 J
Motor
When a Lenze motor is selected, this value is automatically
set.
kg cm
2
--J
Holding brake
This value can be determined from the catalog data and
added to the values mentioned above.
kg m
2
0x2910:2 0x3110:2 J
Gearbox
* Sum of all other moments of inertia of the system. Here, it is
to be considered that these are values that have to be
transformed to the motor shaft (marked by *).
kg cm
2
J
Load
*
J
Total
J
Motor
J
Holding brake
J
Gearbox
*J
Load
*+++=

 Loading...
Loading...






