Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 277
8 Monitoring functions
8.9 Monitoring of the position and velocity error
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
8.9.2 Monitoring of the speed deviation
This function extension is available from version 01.09!
Monitoring of the speed deviation can only be used in the following control modes:
• Servo control for synchronous motor (SM)
• Servo control for asynchronous motor (ASM)
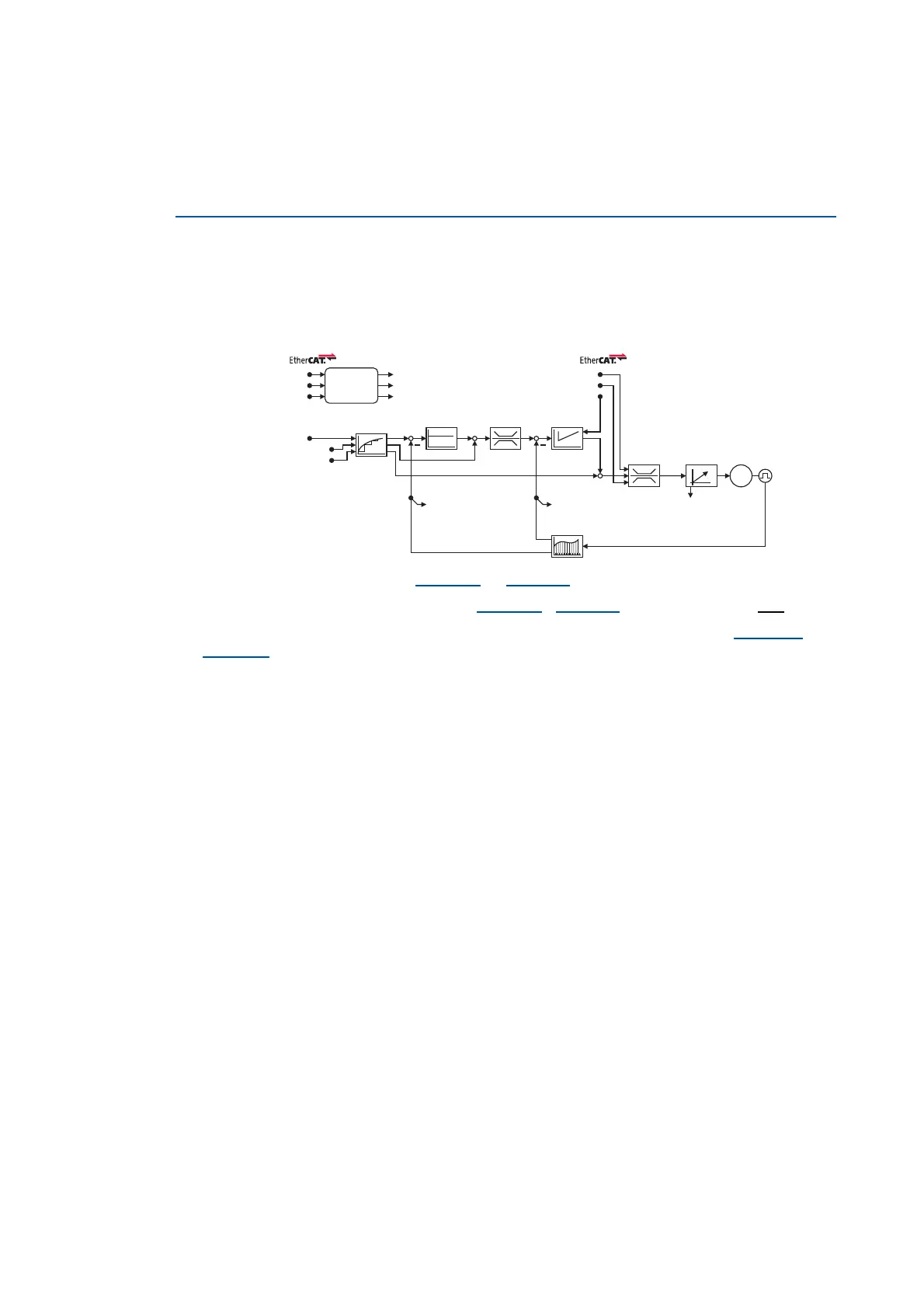
Monitoring of the speed deviation is effective in the operating modes with contained speed
controller. It monitors the system deviation at the input of the speed controller (see blue arrow):
The error response set in the object 0x2D51:3
(or 0x3551:3 for axis B) is executed if
1. the set tolerance of the speed deviation (0x2D51:1
/ 0x3551:1) has been exceeded and
2. the duration of the exceedance is pending uninterruptedly as long as set in the 0x2D51:2 /
0x3551:2
object.
Interpolation
I
q
I
d
M
CTRL
Target position
Velocity offset
Torque offset
Position
controller
Speed ctrl.: Load I component
Position actual value
Controlword
Lenze control word
Modes of operation
Statusword
Lenze status word
Modes of operation display
Positive torque limit value
Negative torque limit value
Speed
limitation
Speed
controller
Torque
limitation
Encoder
evaluation
Field-orientated
control
Torque actual valueVelocity actual value
 Loading...
Loading...








