Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 171
6 Holding brake control
6.6 Settings
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.6 Settings
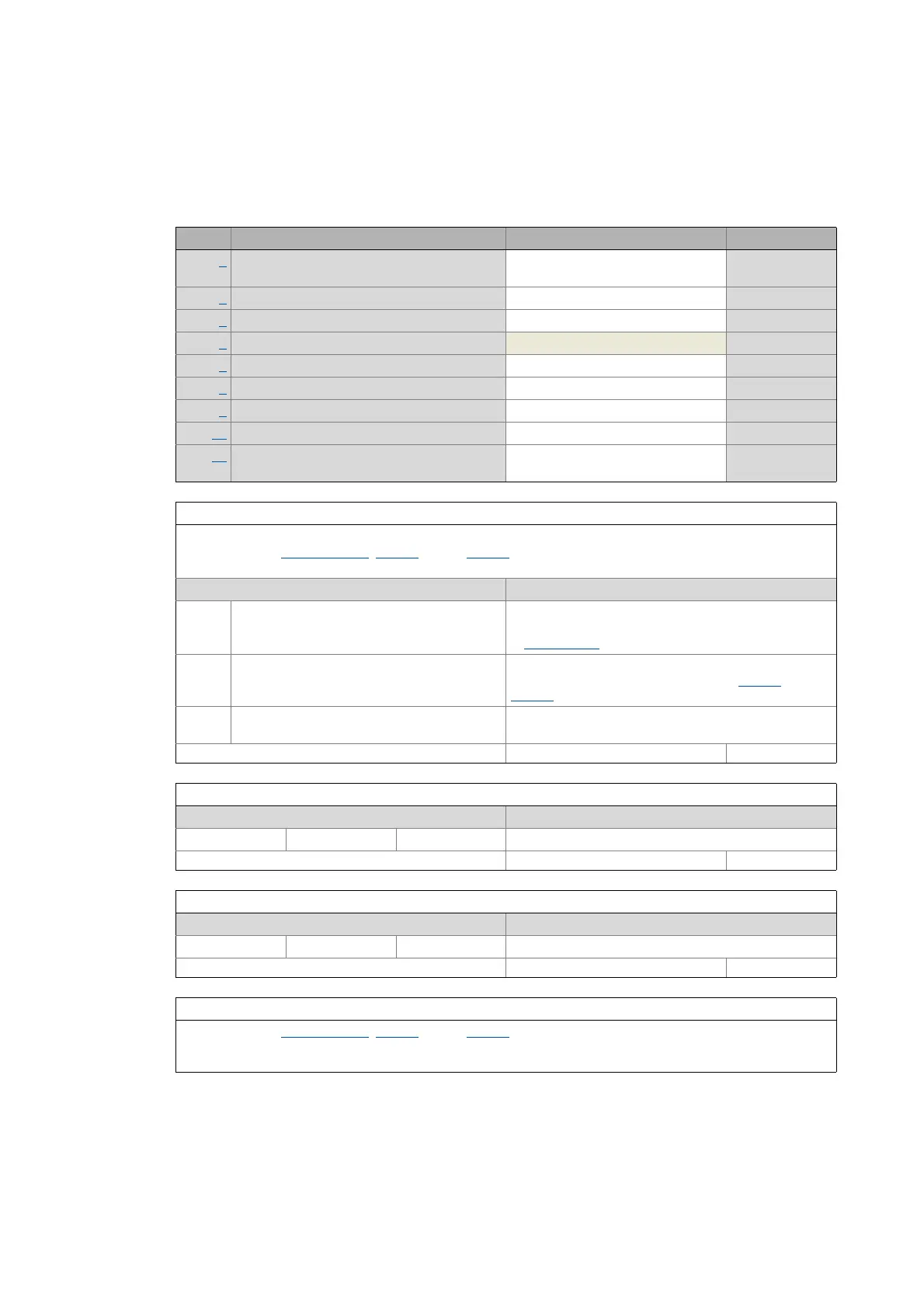
0x2820 | 0x3020 - brake control: settings
Sub. Name Lenze setting Data type
1 Brake: Operating mode 1: Activation via control word by ext.
control system
UNSIGNED_8
2 Brake: Application time 100 ms UNSIGNED_16
3 Brake: Release time 100 ms UNSIGNED_16
4 Brake: Brake identification 0: Identification not active UNSIGNED_16
5 Brake: Control logic 0: Positive logic UNSIGNED_8
6 Brake monitoring: Response 1: Trouble UNSIGNED_8
9 Holding brake: Starting torque source 0: Stopping value UNSIGNED_16
10 Holding brake: Starting torque INTEGER_16
11 Holding brake: Override of the holding brake
control
UNSIGNED_8
Subindex 1: Brake: operating mode
Note:
In the case of the manual control
(0x2825 ="4" or 0x3025 = "4" for axis B), the holding brake is controlled
automatically. The setting of the operating mode is irrelevant in this case.
Selection list (Lenze setting printed in bold) Info
0 Triggering via state machine of device This operating mode serves to release the brake
automatically if controller enable is set.
Device states
1 Triggering via control word from external
controller
In this operating mode the brake can be controlled
manually via bit 14 in the Controlword (0x6040
or
0x6840
for axis B).
2 No brake connected During normal operation, no control, detection, and
monitoring of the brakes take place.
Write access CINH OSC P RX TX UNSIGNED_8
Subindex 2: Brake: application time
Setting range (min. value | unit | max. value) Lenze setting
0 ms 10000 100 ms
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 3: Brake: release time
Setting range (min. value | unit | max. value) Lenze setting
0 ms 10000 100 ms
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 4: Brake: brake identification
In the case of the manual control
(0x2825 ="4" or 0x3025 = "4" for axis B), during the changeover from the
"Switched on" to "Operation enabled" device status, it is automatically determined whether a holding brake is
connected. The brake identification is executed again after every controller enable.

 Loading...
Loading...






