Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 126
5 Motor control & motor settings
5.11 Setting control loops
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.11.4 Setting the position controller
For the automatic calculation of the gain, the "Position controller: Calculate controller parameters"
function is provided via object 0x2822
(or 0x3022 for axis B).
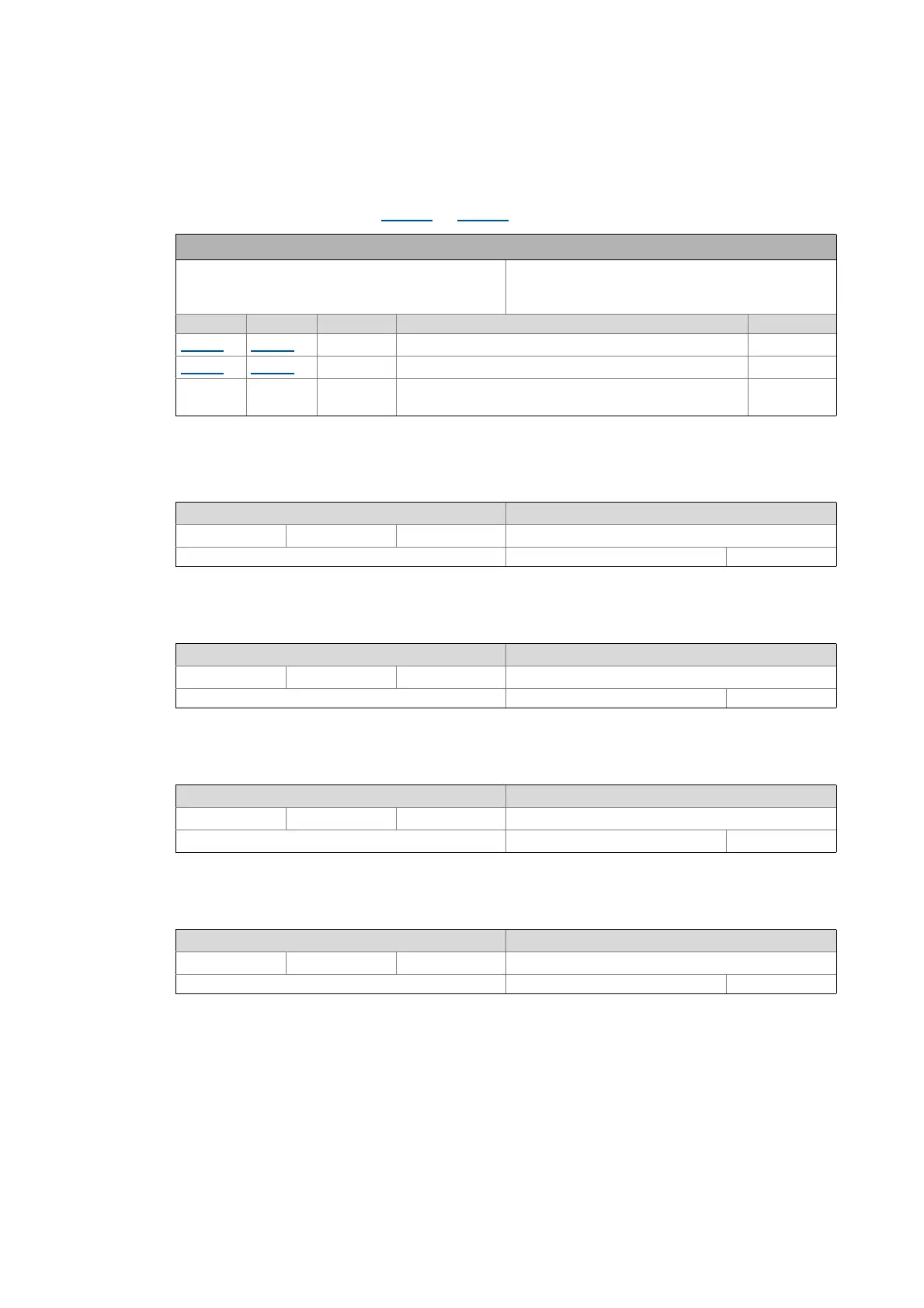
0x2980 | 0x3180 - Position controller: Gain
0x2981 | 0x3181 - Position controller: Gain - adaptation
0x2982 | 0x3182 - Position controller: Output signal limitation
0x2983 | 0x3183 - Position: Select a new actual position
Equations for calculating the gain
Axis A Axis B Symbol Description Dimension unit
0x2980 0x3180 V
p
Position controller: Gain Hz
0x2904
0x3104 T
filter
Actual speed value filter time constant s
-- T
current
controller
Equivalent time constant of the current control loop
= 0.0005 s (500 μs)
s
V
p
1
32 T
Sum
⋅
-----------------------
=
T
Sum
T
Filters
T
Current controller
+=
Setting range (min. value | unit | max. value) Lenze setting
0.00 1/s 1000.00 28.40 1/s
Write access CINH OSC P RX TX Scaling: 1/100 UNSIGNED_32
Setting range (min. value | unit | max. value) Lenze setting
0.00 % 200.00 100.00 %
Write access CINH OSC P RX TX Scaling: 1/100 UNSIGNED_16
Setting range (min. value | unit | max. value) Lenze setting
0 [n unit] 480000 480000 [n unit]
Write access CINH OSC P RX TX
Scaling: 480000/2
31
UNSIGNED_32
Setting range (min. value | unit | max. value) Lenze setting
-2147483647 [Pos unit] 2147483647 0 [Pos unit]
Write access CINH OSC P RX TX INTEGER_32

 Loading...
Loading...






