Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 176
7 CiA402 device profile
7.1 Supported drive modes
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.1 Supported drive modes
Setpoint interpolation in the operating modes with a cyclic setpoint selection
When an operating mode with cyclic setpoint selection is selected, first all setpoints are controlled
via interpolators, which divide the setpoint step-changes down from the bus cycle to the cycle time
of the control loops. All interpolators are parameterised commonly via the "Interpolation time
period" object (0x60C2
or 0x68C2 for axis B).
7.2 Applied units and scaling for position and velocity
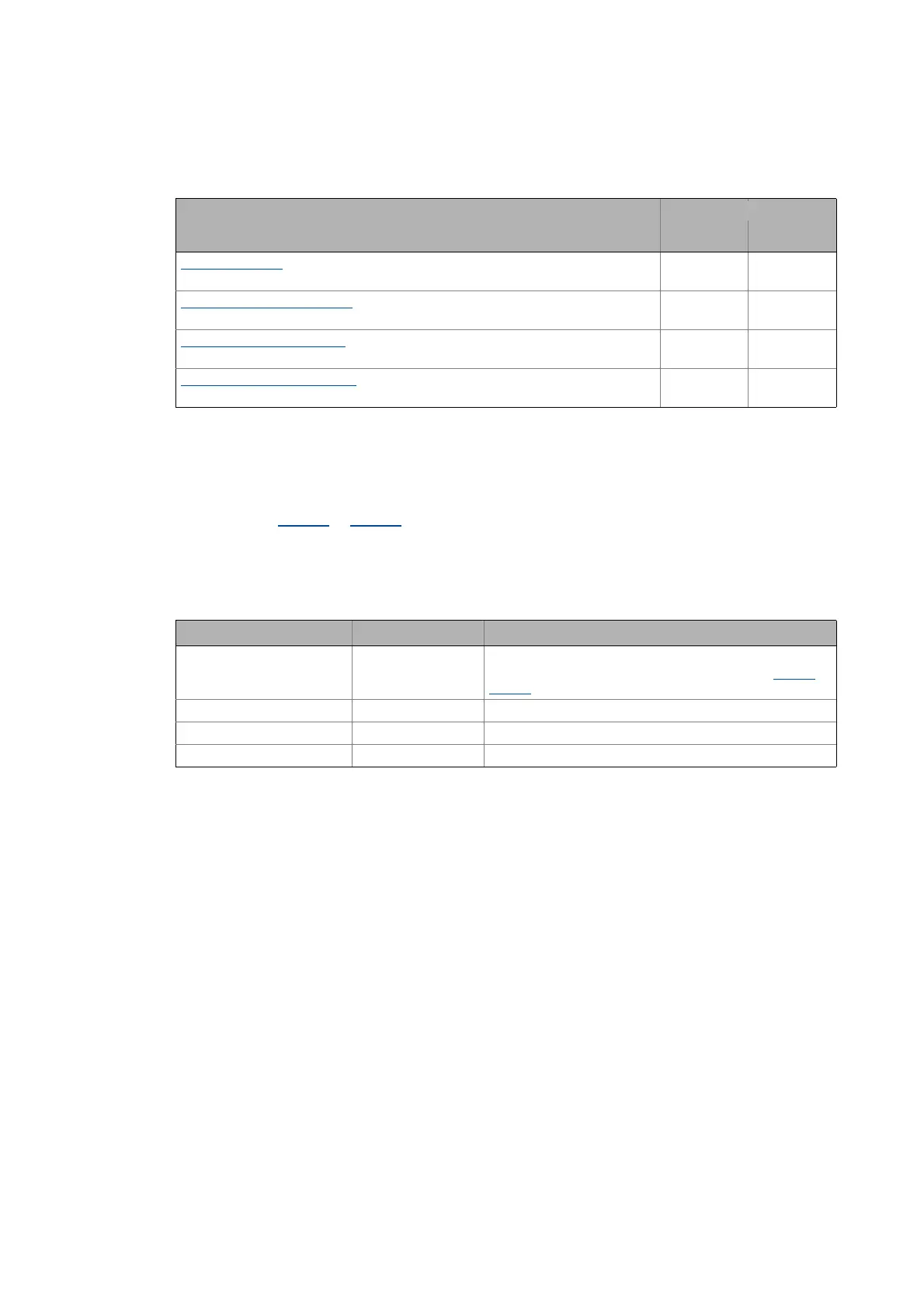
CiA402 - drive modes
Can be used with
Servo control V/f characteristic
control
Velocity mode (vl)
• Speed control
Cyclic sync velocity mode (csv)
• Speed control with interpolation of the speed setpoint.
Cyclic sync torque mode (cst)
• Torque control with interpolation of the torque setpoint.
Cyclic sync position mode (csp)
• Position control with interpolation of the position setpoint.
Name Unit Scaling
CiA402 position Pos unit 2
16
... 2
30
[Pos unit] ≡ 360°
Depending on the position encoder resolution set (0x608F
or
0x688F
for axis B).
Internal position Incr. 2
32
[Incr.] ≡ 360°
CiA402 velocity r/min
Internal velocity n-unit ±2
31
[n-unit] ≡ ±480000 rpm

 Loading...
Loading...






