Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 238
7 CiA402 device profile
7.10 Cyclic sync torque mode (cst)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.10.3 Signal flow
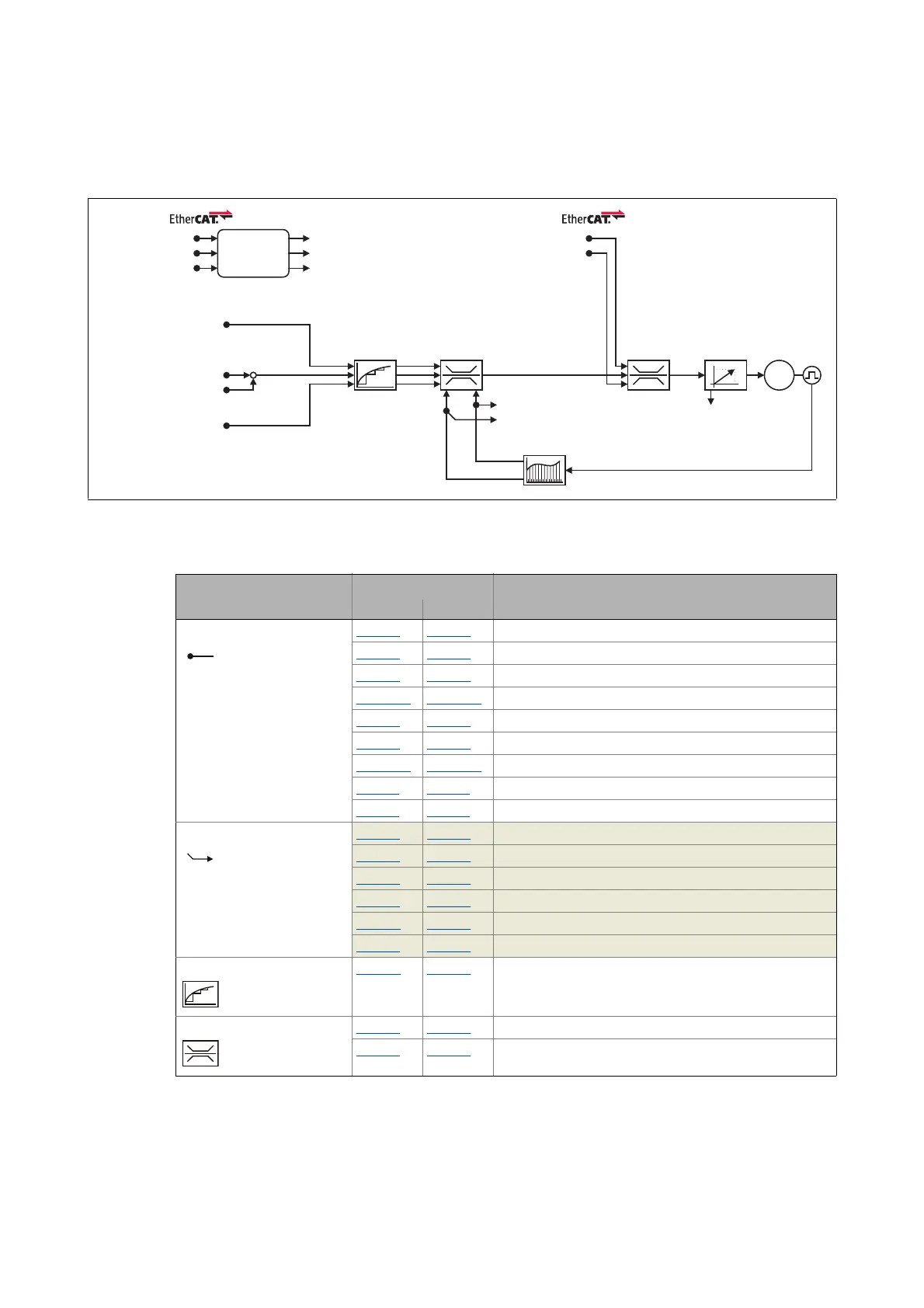
[7-8] Signal flow of the servo control in "Cyclic sync torque mode" (simplified representation)
Short overview of the most important parameters:
I
q
I
d
M
CTRL
Speed limitation:
Upper speed limit
Torque offset
Target torque
Speed limitation:
Lower speed limit
Interpolation
Speed
limitation
Velocity actual value
Position actual value
Controlword
Lenze control word
Modes of operation
Statusword
Lenze status word
Modes of operation display
Positive torque limit value
Negative torque limit value
Torque
limitation
Encoder
evaluation
Field-orientated
control
Torque actual value
Function Object Name
Axis A Axis B
Input data 0x6040 0x6840 Controlword
0x2830
0x3030 Lenze control word
0x6060
0x6860 Operating mode: Selection
0x2946:1
0x3146:1 Speed limitation: Upper speed limit
0x60B2
0x68B2 Torque offset
0x6071
0x6871 Target torque
0x2946:2
0x3146:2 Speed limitation: Lower speed limit
0x60E0 0x68E0 Positive torque limit value
0x60E1
0x68E1 Negative torque limit value
Output data
0x6041 0x6841 Statusword
0x2831 0x3031 Lenze status word
0x6061 0x6861 Modes of operation display
0x6064 0x6864 Position actual value
0x606C 0x686C Velocity actual value
0x6077 0x6877 Torque actual value
Interpolation 0x60C2
0x68C2 Interpolation time period
Speed restriction 0x6080
0x6880 Max motor speed
0x2903 0x3103 Speed: Speed setpoint - filter time

 Loading...
Loading...






