7 CiA402 device profile
7.6 Parameters for actuation of the position control
205
Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.6 Parameters for actuation of the position control
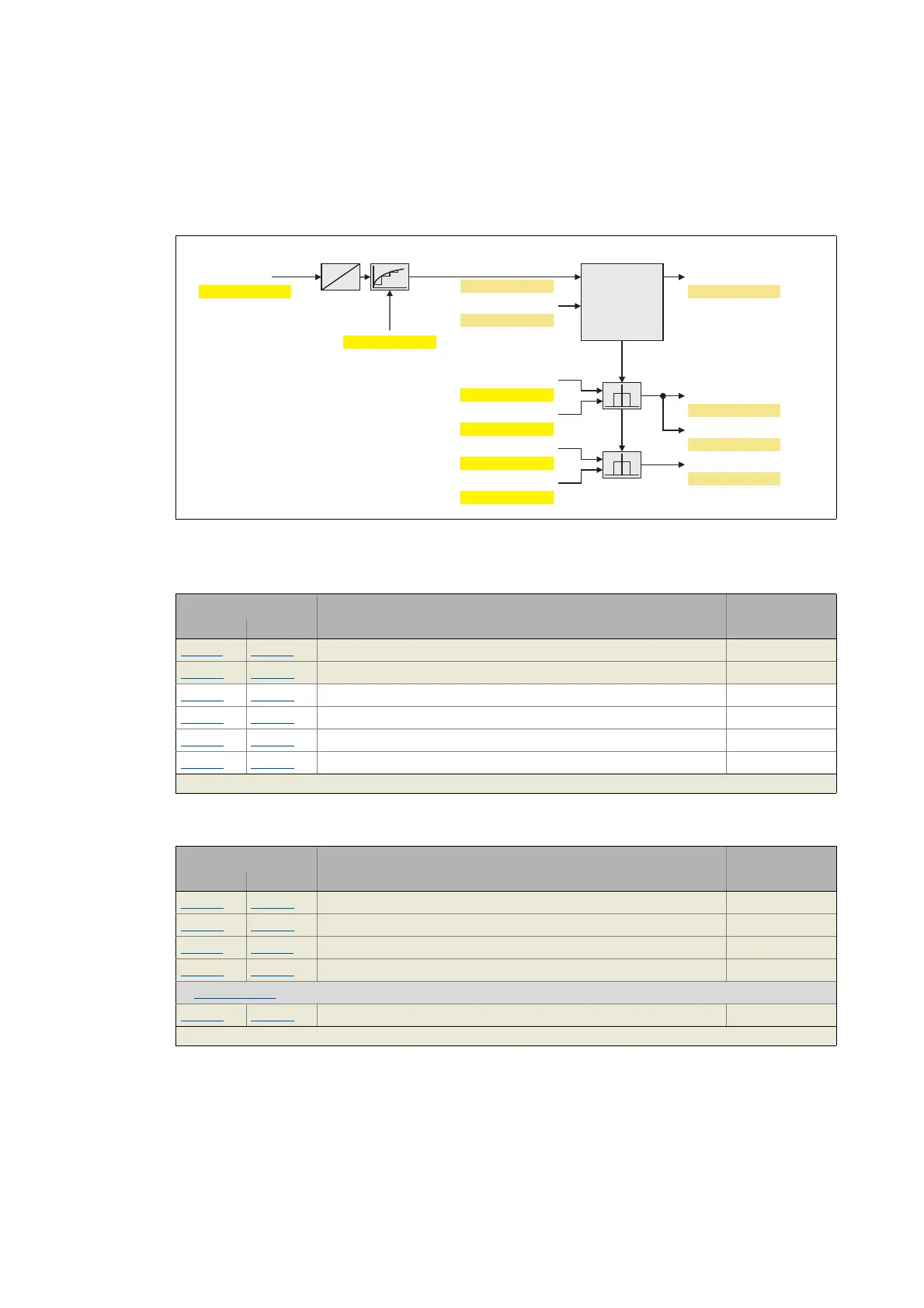
The objects described in this chapter actuate the position control (including the following error and
in-position recognition). All objects comply with the CiA402 specification.
[7-1] Access to the position control via the CiA402 device profile
Input data
Output data
0x6062 | 0x6862 - Position demand value
Interpolation
Unit
_p
0x607A | 0x687A
0x60C2 | 0x68C2
0x60FC | 0x68FC
0x6063 | 0x6863
0x6065 | 0x6865
0x6066 | 0x6866
0x6067 | 0x6867
0x6068 | 0x6868
0x60FA | 0x68FA
0x60F4 | 0x68F4
0x6041 | 0x6841
0x6041 | 0x6841
Position demand internal value
Position actual internal value
Interpolation time period
Control effort
Following error window
Following error time out
Position window
Position window time
Following error actual value
Statusword / Bit 10
Statusword / Bit 13
Target position
Closed
loop
position
control
Object Name Data type
Axis A Axis B
0x60FC 0x68FC Position demand internal value INTEGER_32
0x6062 0x6862 Position demand value INTEGER_32
0x6065
0x6865 Following error window UNSIGNED_32
0x6066
0x6866 Following error time out UNSIGNED_16
0x6067
0x6867 Position window UNSIGNED_32
0x6068
0x6868 Position window time UNSIGNED_16
Greyed out = read access only
Object Name Data type
Axis A Axis B
0x6063 0x6863 Position actual internal value INTEGER_32
0x6064 0x6864 Position actual value INTEGER_32
0x60F4 0x68F4 Following error actual value INTEGER_32
0x60FA 0x68FA Control effort INTEGER_32
Device control
0x6041 0x6841 Statusword UNSIGNED_16
Greyed out = read access only
Interpolated set position for the position control

 Loading...
Loading...






