5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
93
Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Deactivating the resolver error compensation
For the deactivation of the resolver error compensation, the corresponding parameters must be
reset to the Lenze setting again.
5.9.3 Settings for "encoder" version
The use of an incremental sin/cos encoder is preset. If a sin/cos absolute value encoder with
HIPERFACE® protocol is connected instead, select "2" in 0x2C40
(or 0x3440 for axis B) and adapt the
encoder parameters (e.g. supply voltage) accordingly.
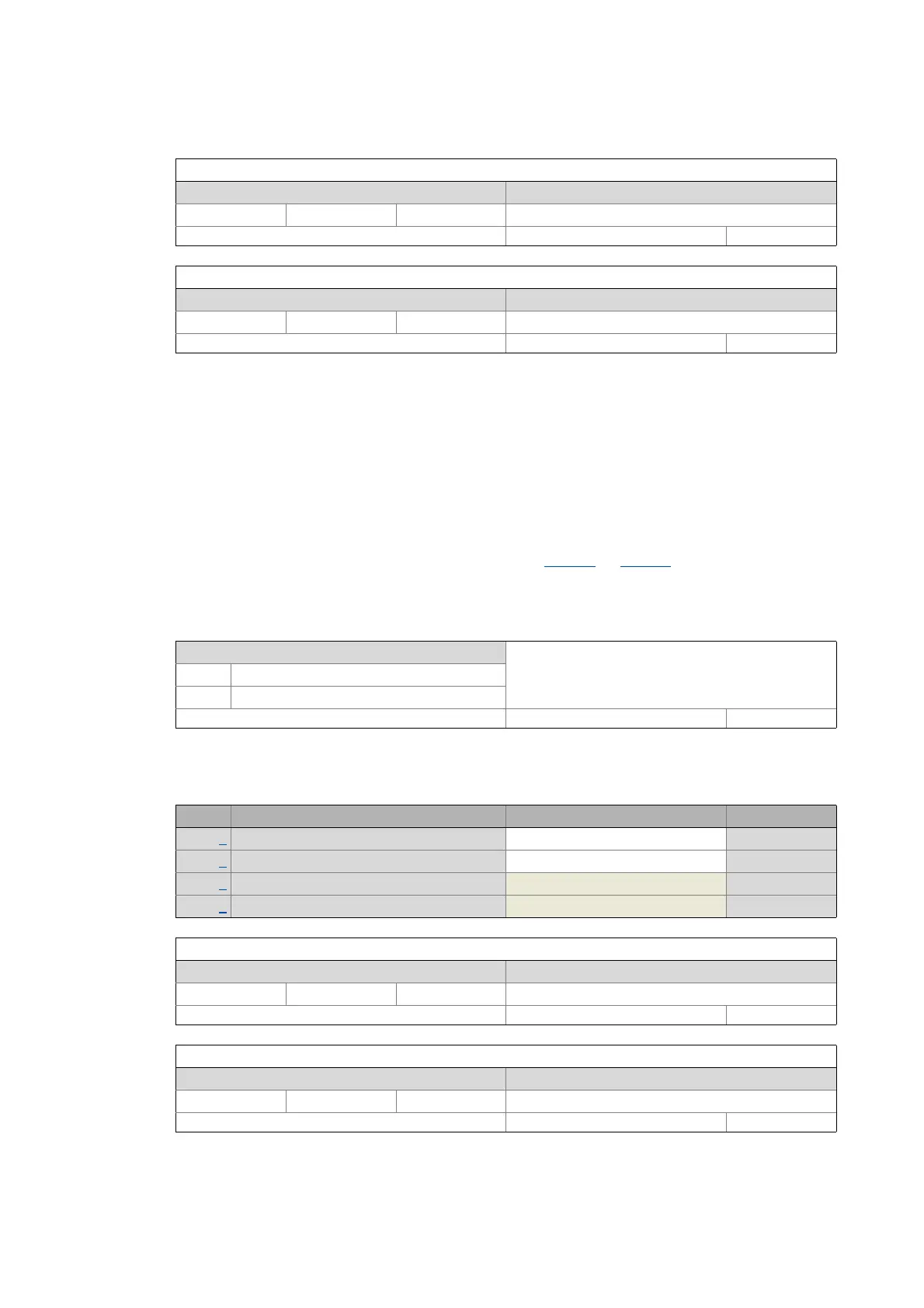
0x2C40 | 0x3440 - Encoder: Type
0x2C42 | 0x3442 - Encoder: Parameter
Subindex 2: Resolver error compensation: Cosine track gain
Setting range (min. value | unit | max. value) Lenze setting
0 % 100 100 %
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 3: Resolver error compensation: Sine track gain
Setting range (min. value | unit | max. value) Lenze setting
0 % 100 100 %
Write access CINH OSC P RX TX UNSIGNED_16
Selection list (Lenze setting printed in bold)
1 Sin/cos encoder
2 Hiperface absolute value encoder
Write access CINH OSC P RX TX UNSIGNED_8
Sub. Name Lenze setting Data type
1 Encoder: Increments / revolution 1024 UNSIGNED_32
2 Encoder: Supply voltage 5.0 V UNSIGNED_8
3 Encoder: Angle drift - Actual angle error INTEGER_16
4 Encoder: Signal quality - Actual amplitude UNSIGNED_8
Subindex 1: Encoder: Increments / revolution
Setting range (min. value | unit | max. value) Lenze setting
1 131072 1024
Write access CINH OSC P RX TX UNSIGNED_32
Subindex 2: Encoder: Supply voltage
Setting range (min. value | unit | max. value) Lenze setting
5.0 V 12.0 5.0 V
Write access CINH OSC P RX TX Scaling: 1/10 UNSIGNED_8

 Loading...
Loading...






