7 CiA402 device profile
7.9 Cyclic sync velocity mode (csv)
225
Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
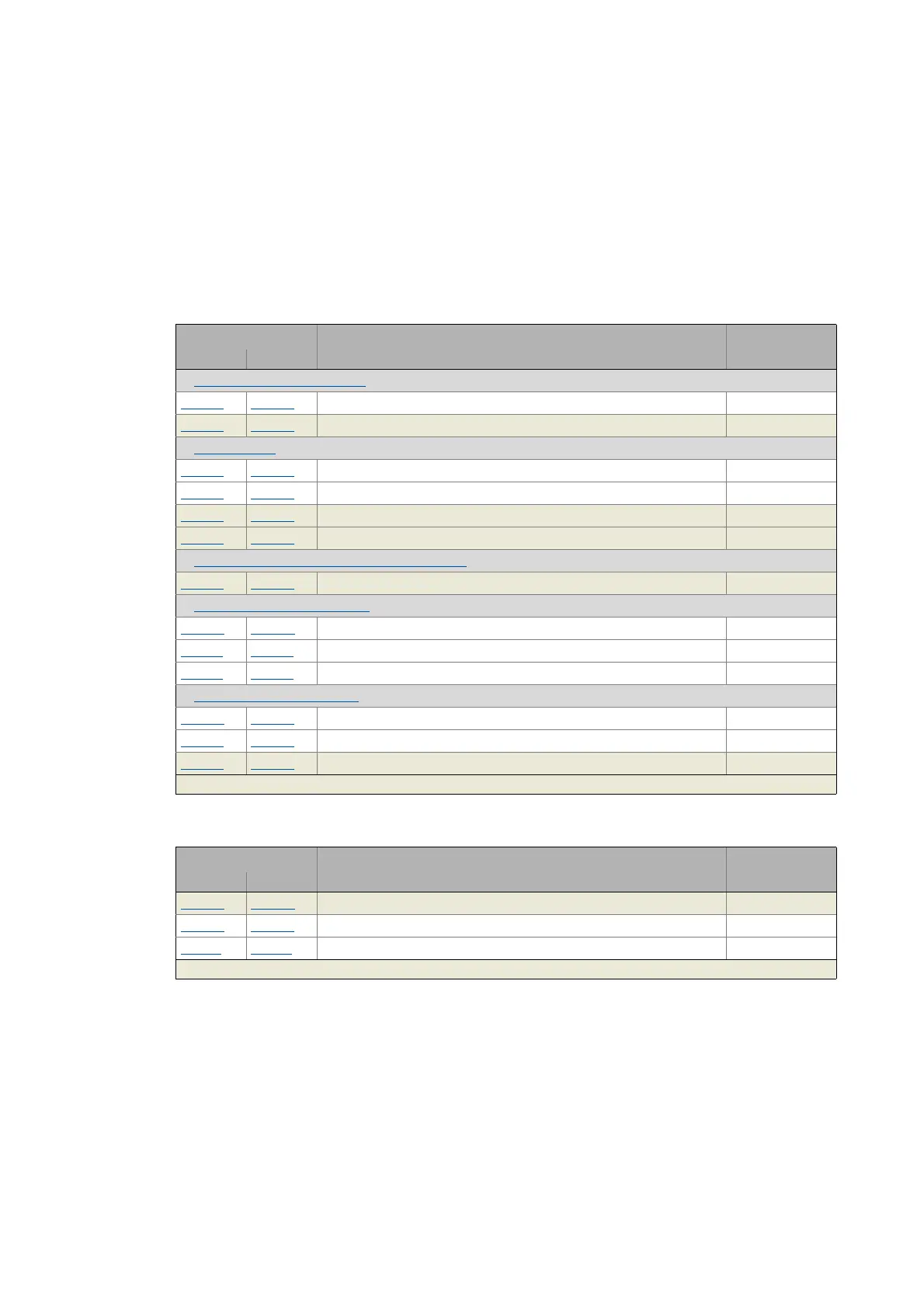
7.9.2 Object description
The following two tables provide an overview of the most important objects for this operating
mode (without motor parameters, motor control parameters, and feedback parameters).
All objects correspond to the CiA402 specification, but some of them have only a restricted value
range.
Objects described in other chapters:
Objects described in this chapter:
0x606C | 0x686C - Velocity actual value
Object Name Data type
Axis A Axis B
Lenze control and status word
0x2830 0x3030 Lenze control word UNSIGNED_16
0x2831 0x3031 Lenze status word UNSIGNED_16
Device control
0x6040 0x6840 Controlword UNSIGNED_16
0x6060
0x6860 Operating mode: Selection INTEGER_8
0x6041 0x6841 Statusword UNSIGNED_16
0x6061 0x6861 Modes of operation display INTEGER_8
Parameters for actuation of the position control
0x6064 0x6864 Position actual value INTEGER_32
Cyclic sync position mode (csp)
0x60C2 0x68C2 Interpolation time period RECORD
0x60E0
0x68E0 Positive torque limit value UNSIGNED_16
0x60E1
0x68E1 Negative torque limit value UNSIGNED_16
Cyclic sync torque mode (cst)
0x60B2 0x68B2 Torque offset INTEGER_16
0x6071
0x6871 Target torque INTEGER_16
0x6077 0x6877 Torque actual value INTEGER_16
Greyed out = read access only
Object Name Data type
Axis A Axis B
0x606C 0x686C Velocity actual value INTEGER_32
0x60B1
0x68B1 Velocity offset INTEGER_32
0x60FF
0x68FF Target velocity INTEGER_32
Greyed out = read access only
Current speed

 Loading...
Loading...






