Components description
H00007091 - Absolute Arm User Manual │Version 5.2.0 (2019-03-07) │52
B.6 STANDARD PROBES
At the end of the Absolute Arm is mounted the final sensor: the probe or the scanner. It may be contact
probe (hard or trigger), tube Non-Contact probe, or scanner.
For Tube probes description and all probes use and alignment, refer to next chapter.
For RS5 scanner description, refer to the 7 axes wrist description chapter.
For external scanners description, refer to the scanner manual.
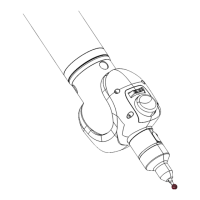
B.6.1 CONTACT PROBES
Fig. 22 : Contact probe description
a. Probe body
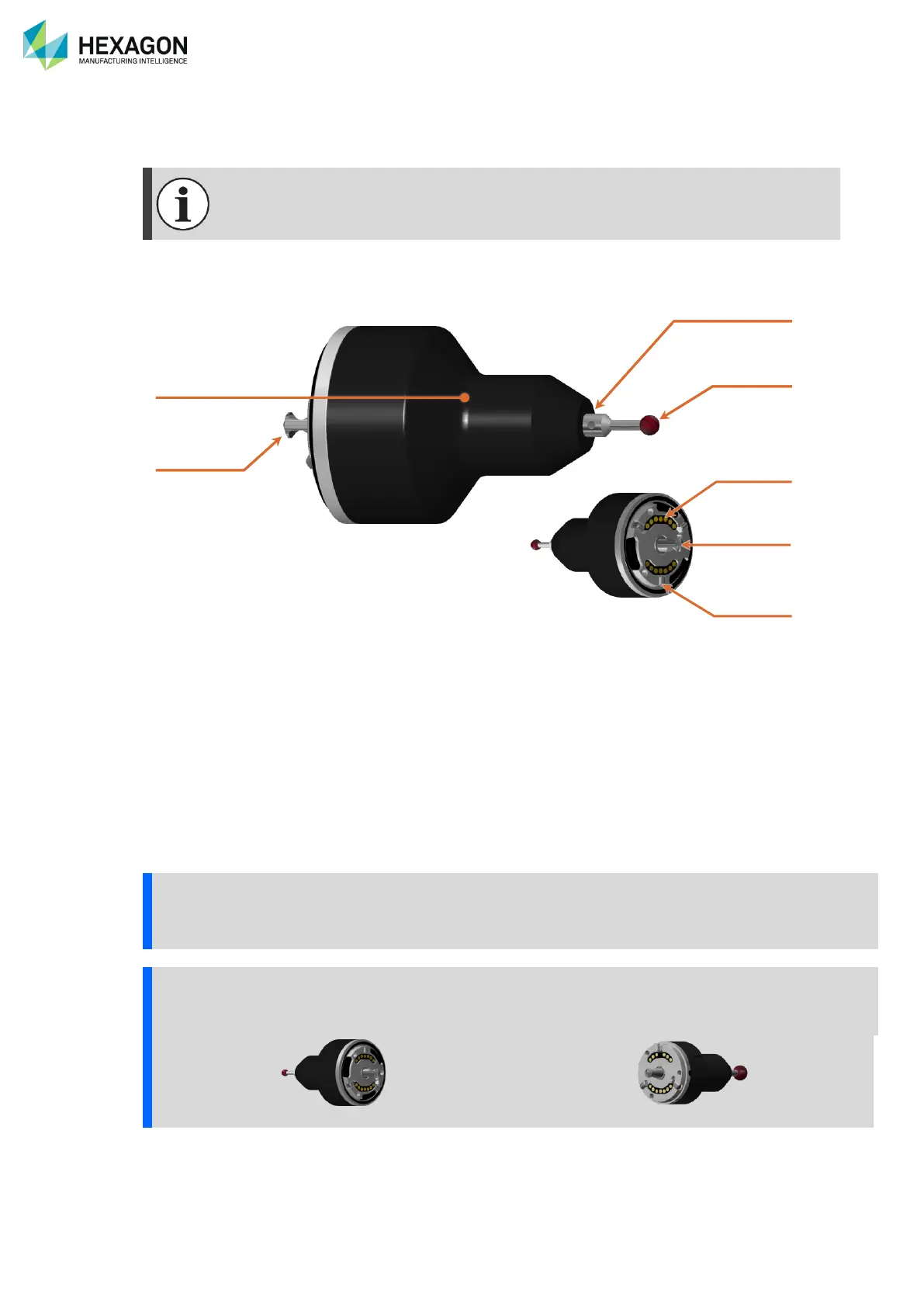
b. TKJ Mounting interface
c. M3 stylus thread (except ball Ø ≥ 10mm)
d. Stylus probing ball
e. Connector contacts to the arm
f. (TKJ) locking grip
g. (TKJ) Repeatable plots
The standard contact probes are composed by a mounting interface (TKJ or thread), a body and a tip
stylus. The stylus is mounted on the body through a M3 thread. Any kind of M3 stylus can be mounted on
the body.
The accuracy specifications of the arm are guaranteed only with the standard probes. Check the rigidity
of the stylus stem before any operation.
TKJ probes V1 can still be used on the arm.
 Loading...
Loading...