Address Name / seng range / [default seng] Info
0x606C Velocity actual value
•
R
ead only: rpm
Display of the actual velocity.
0x6077 Torque actual value
•
Read only: x.x %
Display of the current torque.
•
100 %
≡ Rated Motor Torque. 40x6076
0x60F4 Following error actual value
•
R
ead only: x pos. unit
Display of the current following error.
9.5 Monitoring the posion error
Posion error monitoring can be used for the following control modes:
•
Ser
vo control for synchronous motor (SM), 0x2C00 = [1]
•
Servo control for asynchronous motor (ASM), 0x2C00 = [2]
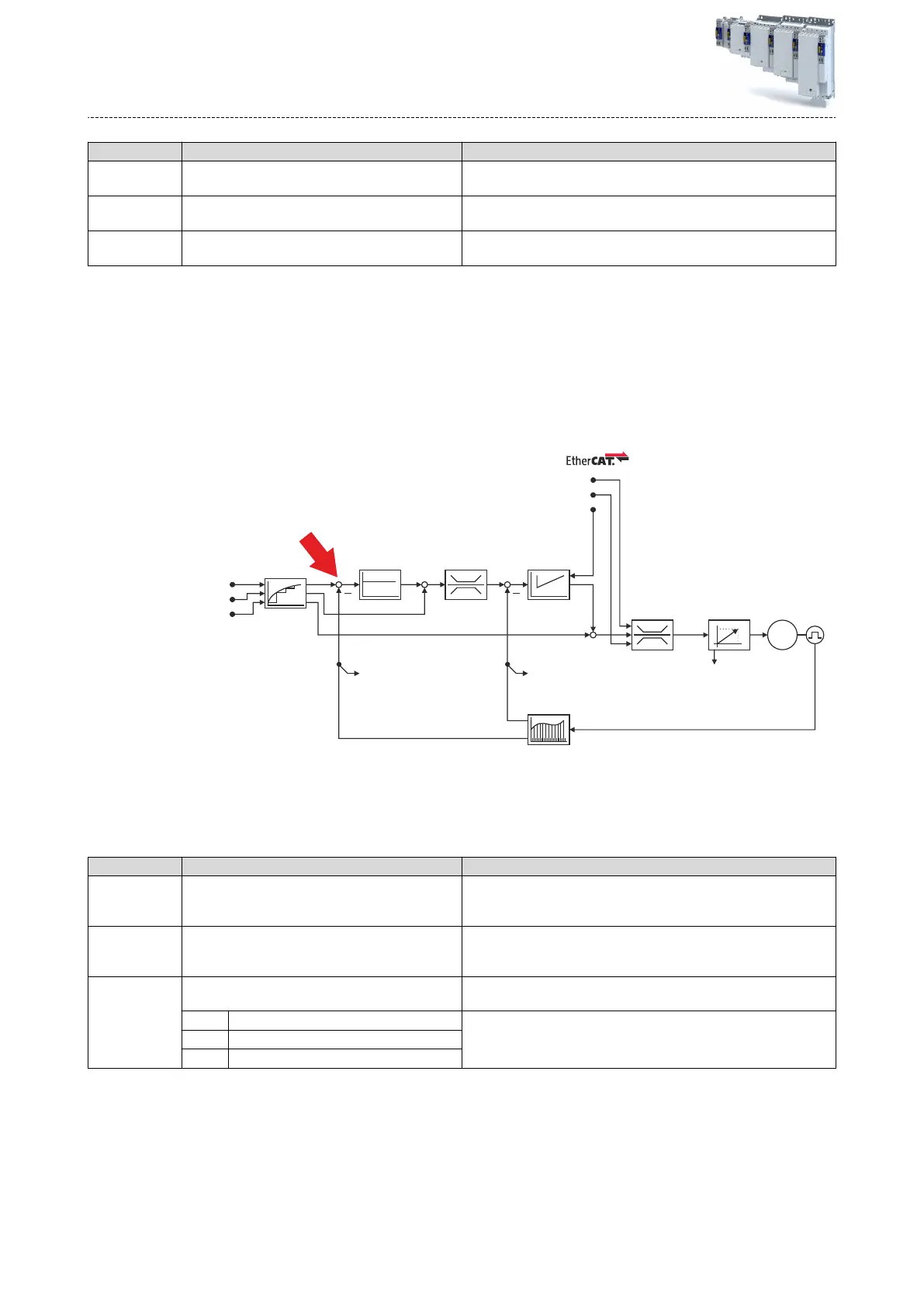
Following error monitoring is eecve in an operang mode with posion controller. The sys-
t
em deviaon (i. e. the following error) is compared to the following error tolerance set at the
input of the posion controller (see red arrow in the gure below).
I
q
I
d
M
Interpolation
Target position
V
elocity offset
Torque offset
Position
controller
Speed ctrl.: Load I component
Position actual value
Positive torque limit value
Negative torque limit value
Speed
limitation
Speed
controller
Torque
limitation
Encoder
evaluation
Field-orientated
control
Torque actual value
Velocity actual value
The error response set in 0x2D51:006 is e
xecuted if ...
1.
the f
ollowing error tolerance set in 0x2D51:004 is exceeded and ...
2.
the exceedance lasts at least as long as set in 0x2D51:005.
Parameter
Address Name / seng range / [default seng] Info
0x2D51:004 Posion error/speed error - monitoring: Posion error
- err
or threshold
1 ... [360] ... 2147483647 °
Seng of the error threshold for posion error monitoring.
0x2D51:005 Posion error/speed error - monitoring: Posion error
- min. me for error
0 ... [0] ... 50 ms
Seng of the minimum me a posion error must be pending unl an
error/warning message is triggered.
0x2D51:006 Posion error/speed error - monitoring: Posion error
- error response
Seng of the error response of posion error monitoring.
0 No response
1 Fault > CiA402
2 Warning
Congure
posion control
Monitoring the posion error
140
 Loading...
Loading...








