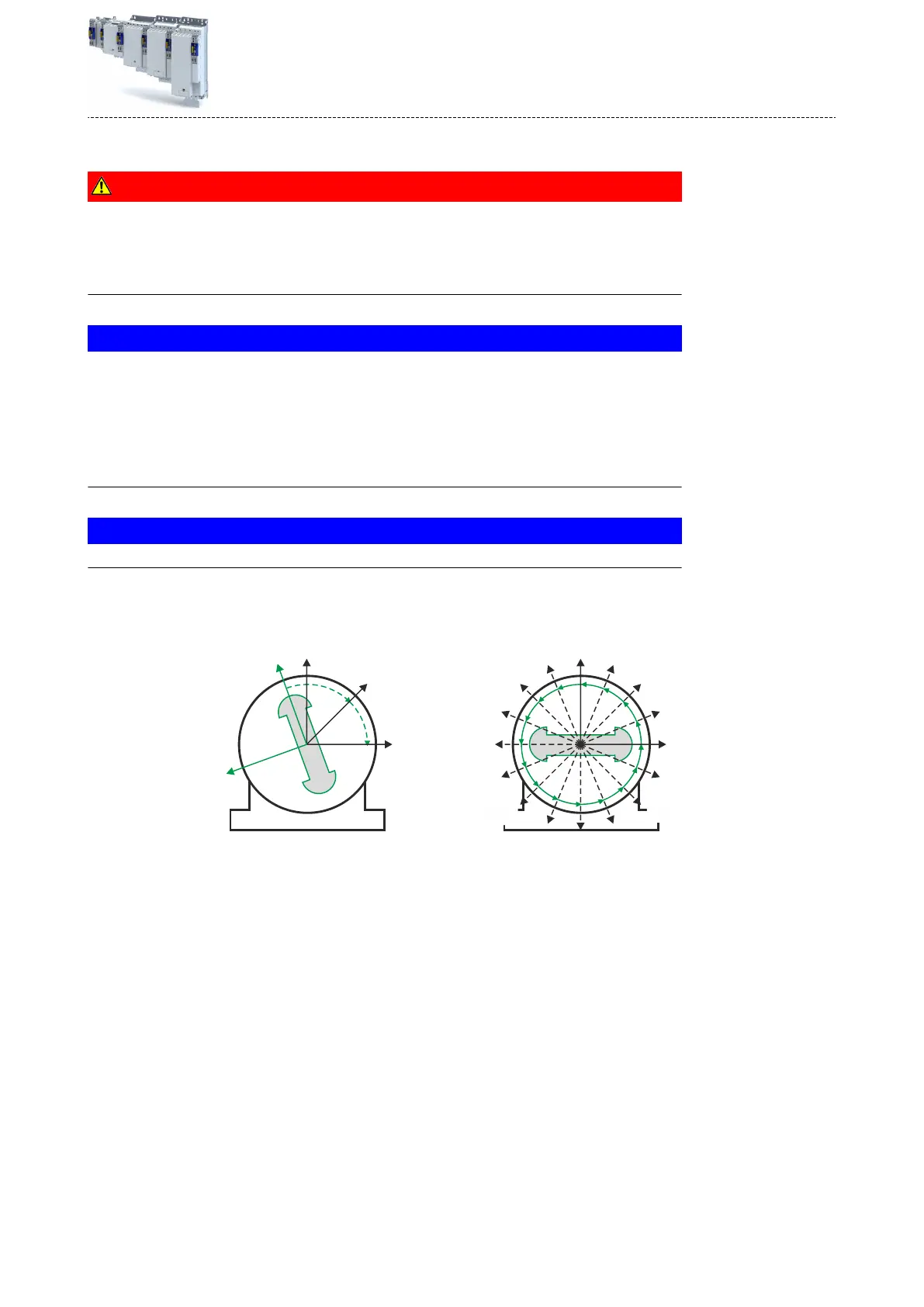
12.4.2 Pole
posion idencaon (PPI) 360°
DANGER!
Mechanical damage of the motor caused by hanging loads!
The mot
or may be permanently damaged.
▶
The motor must not be braked or blocked during the pole posion idencaon. Thus, this
funcon must not be used for hanging loads!
NOTICE
Thermal overload of the motor!
The mot
or may be permanently damaged.
▶
Before execung the pole posion idencaon, check that the following monitoring sys-
tems are parameterised correctly.
▶
Motor overload monitoring (i²*t)
▶
Overcurrent monitoring
NOTICE
▶
Please observe the following: S
ynchronous motor: Pole posion idencaon (PPI)
Funconal
descripon
0° α
22.5°
45°
45°
67.5°
90°
112.5°
135°
157.5°
180°
202.5°
247.5°
270°
292.5°
337.5°
β
0° , d α
q β
d
q
225°
315°
Conguring the feedback system
S
ynchronous motor: Pole posion idencaon (PPI)
Pole posion idencaon (PPI) 360°
203
 Loading...
Loading...








