19.19 Repair mode select (RMS)
This funcon moves the drive from a situaon that is blocking it ("Deadlock").
In the safety concept, this state is taken into consideraon as a special case for actuang an
a
xis connected. The encoders connected are not evaluated in a safety-oriented fashion.
DANGER!
In the RMS operang mode unexpected movements with an unexpected speed may occur.
In the RMS operang mode, the permissible moon limits of the axis may be violated.
▶
The use of the RMS funcon is exclusively permissible to release an axis from a "deadlock".
If possible, the OMS funcon should be used!
▶
In the RMS operang mode, exclusively the enable switch is eecve. Ensure, if necessary
b
y addional safety measures, that no persons can be endangered.
In the repair mode, the safety funcons are solely restricted to the parameteris-
able S
TO and SS1 stop funcons (without ramp monitoring) and the eecve-
ness of the enable switch.
DANGER!
With this funcon, all monitoring funcons are
deacvated.
The state of the facility is not monitored.
▶
Only use this funcon for a vercal axis with a brake on the load side.
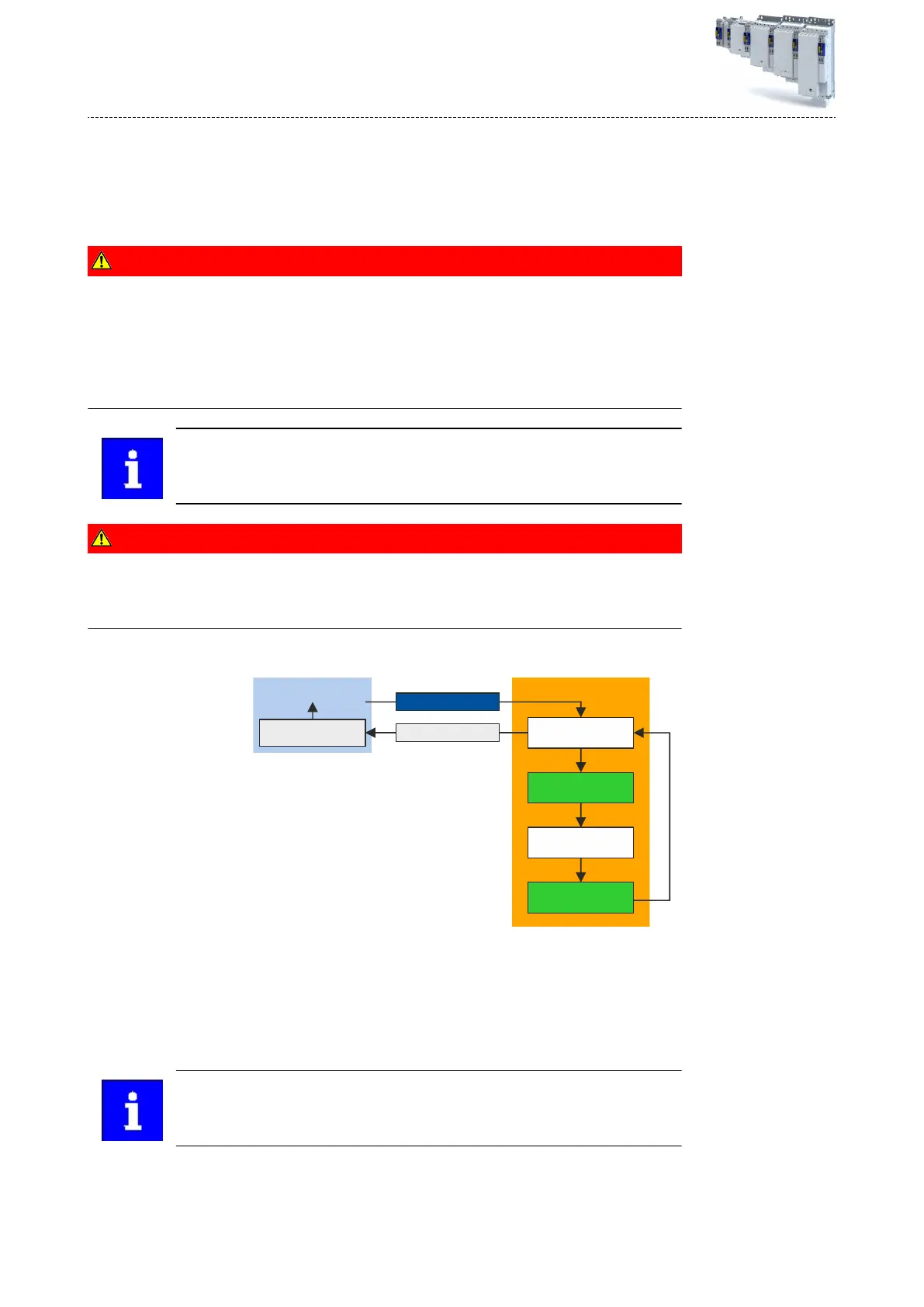
Funconal
descripon
Aktivierung RMS
Zustimmtaster (ES)
aktiv
Zustimmtaster (ES)
inaktiv
Normalbetrieb
Bewegungsfunktion
Repair Mode Select (RMS)
Bestätigung (AIS)
für Wiederanlauf
Stopp-Funktion
Deaktivierung RMS
Fig. 79: RMS funcon
In the repair mode, speed funcons and absolute posion funcons are deacvated. The
SHOM status is reset. 4Safe homing (SHOM) ^ 404
Request of the repair mode
The repair mode is requested by the "ON state" on a safe input. The funcon must have been
assigned t
o the corresponding input by parameterisaon.
Only if no safe input is ulised, the funcon can be acvated via the safety bus.
Via the sa
fety bus, a data telegram with a corresponding content is sent to the
inverter, see safety bus .
Safety
funcons
Repair mode select (RMS)
414
 Loading...
Loading...








