19.8 Safely-Limited Speed (SLS)
The safety
funcon monitors the speed Nlim parameterised, if the following states have occur-
red:
•
the speed par
ameterised is not reached.
•
the braking
me set has elapsed.
WARNING!
A safety-rated encoder system must be used.
Without an enc
oder, this safety funcon cannot be used.
▶
Apply a safety-rated encoder system to use this funcon.
Precondions
The drive must be braked by the applicaon.
If the SLS funcon is combined with the Sa
fe Direcon (SDI) funcon, the values for the delay
mes (0x28C4:0010x28C4:001 ... 0x28C4:0040x28C4:004) must be coordinated. The Nlim
braking me (0x28C3:0010x28C3:001 ... 0x28C3:0040x28C3:004) starts at the same me as
the SDI delay me. See 4Sa
fe Direcon (SDI) funcon. ^ 396
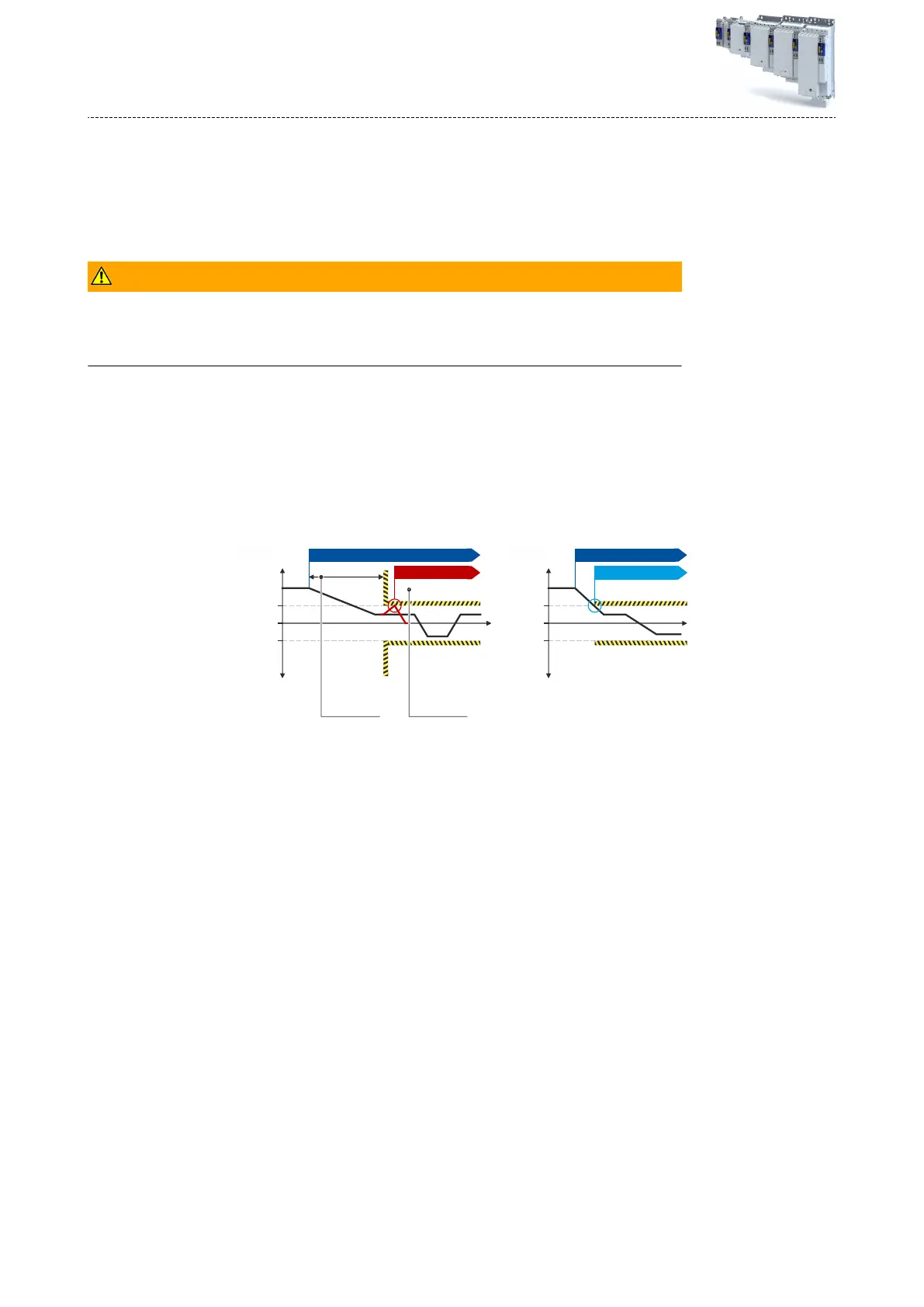
Funconal descripon
t
0
SLS
n
Nlim
STO/SS1/SS2
-Nlim
t
0
SLS
n
Nlim
SLS observed
-Nlim
0x28C3:001 ...
0x28C3:004
0x28C5:001 ...
0x28C5:004
Fig. 71: SLS funcon
If
operaon within the limit values is performed, the "SLS1...4 monitored" ("SLS observed")
status is set in 0x2870:002, bits 0 ... 3 = 1.
The status can
•
be assigned to the safe output as safe speed monitor.
•
be reported via the safety bus.
The permissible direcon of movement is set via 0x28C4:0010x28C4:001 ...
0x28C4:0040x28C4:004.
Via a safe input, if the corresponding parameter is assigned to the safe input.
Acvaon of the funcon
A data telegram is sent to the inverter via the safety bus. See chapter "Safe network interfa-
ces". ^ 417
Behaviour of the funcon in the event of an error
If the speed is exceeded in the monitored state, an error message is triggered. For the SLS
safety funcon, the following error responses can be parameterised as safe stop:
4Safe Torque O (STO)^ 374
4Sa
fe Stop 1 (SS1)^ 379
4Safe Stop 2 (SS2)^ 382
Safety
funcons
Safely-Limited Speed (SLS)
388
 Loading...
Loading...








