6.2.10.1 Homing modes
Designaon Inial value Evaluated signals/sensors
TP sensor: encoder
z
ero pulse
Travel range limit switch Reference switch
HomeAbsSwitch
negave posive
Set posion directly 0 Set reference directly
CcwLimitSwitchCwTP 1 X X
CwLimitSwitchCcwTP 2 X X
CwRpCcwRnTP 3 X X
CcwRpCwRnTP 5 X X
CcwLimitSwitch 17 X
CwLimitSwitch 18 X
CwRpCcwRn 19 X X
CcwRpCwRn 21 X X
CcwTP 33 X
CwTP 34 X
ResetHomeInfo 99 If the reference is known, the status is reset.
CwTorqueLimit -2 Posive direcon to torque limit
CcwTorqueLimit -1 Negave direcon to torque limit
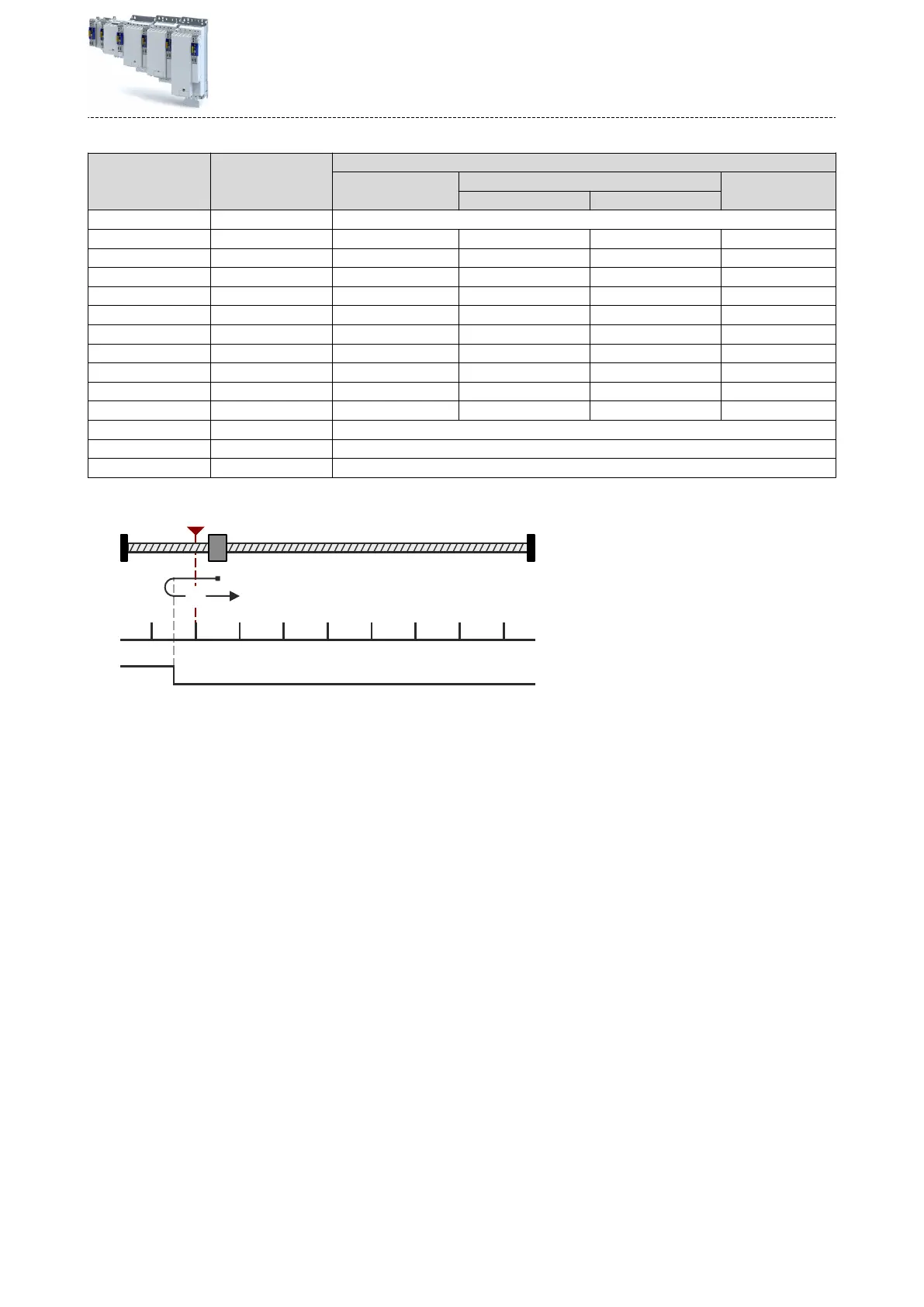
Homing mode 1: CcwLimitSwitchCwTP
Fig. 7: Negave
direcon with reversing limit switch to touch probe
A Touch probe/zero pulse B Negave travel range limit switch
Sequence of case ①:
1.
The machine part mo
ves in negave direcon with prole data set 1.
2.
The machine part r
everses to the negave travel range limit switch (B) and changes to
prole data set 2.
3.
The negave edge of the travel range limit switch (B) acvates the touch probe detecon.
4.
The f
ollowing posive edge of the encoder zero pulse/touch probe sensor (A) sets the ref-
er
ence.
5.
Further acons can be selected:
•
Drive stops (default seng).
•
Relave posioning by a set target posion.
•
Ab
solute posioning to a set target posion.
Technology applicaon (TA) basic sengs
Moon sengs
Homing
61
 Loading...
Loading...








