6.5.3 Connecting the motor holding brake
6.5.3.1 Inter
face description (converter side)
Overview
The motor holding brake prevents the moving load from unexpected motions (for example,
falling under the inuence of gravity) when the servo drive system is deactivated.
The holding brake is activated once the motor power is cut o. Use the holding brake only
when the motor is at a standstill. Do not use the holding brake to stop the load in motion.
Description
S200 PN
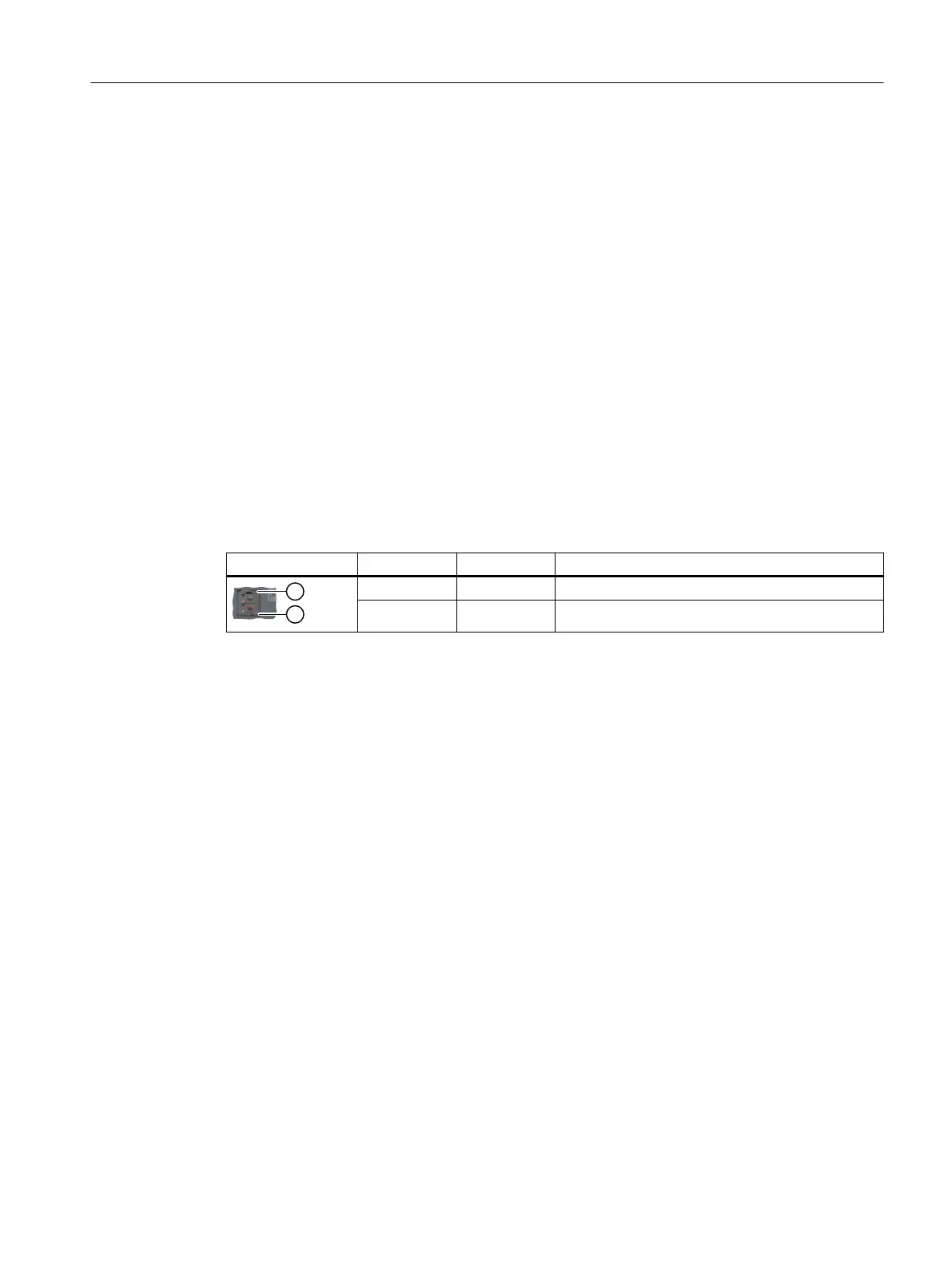
SINAMICS S200 PN connects to the motor holding brake via the interface X108.
Table 6-5 Interface X108
X108 Terminal Designation Technical specications
1 BRN Motor holding brake, negative
2 BRP Motor holding brake, positive
S200 Basic PN
SINAMICS S200 Basic PN does not ha
ve a designated interface for connecting to the holding
brake. To use the holding brake, connect a third-party device via a digital output at the
interface X130 and congure the holding brake function as follows:
• Set p1215 to 3.
• Interconnect the digital output signal to r0899.12.
6.5.3.2 Interface description (motor side)
Overview
The motor holding brake interface on the motor is used to connect the built-in holding brake to
the converter.
Connecting
6.5Connecting the motor
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB 139

 Loading...
Loading...






