Description of function
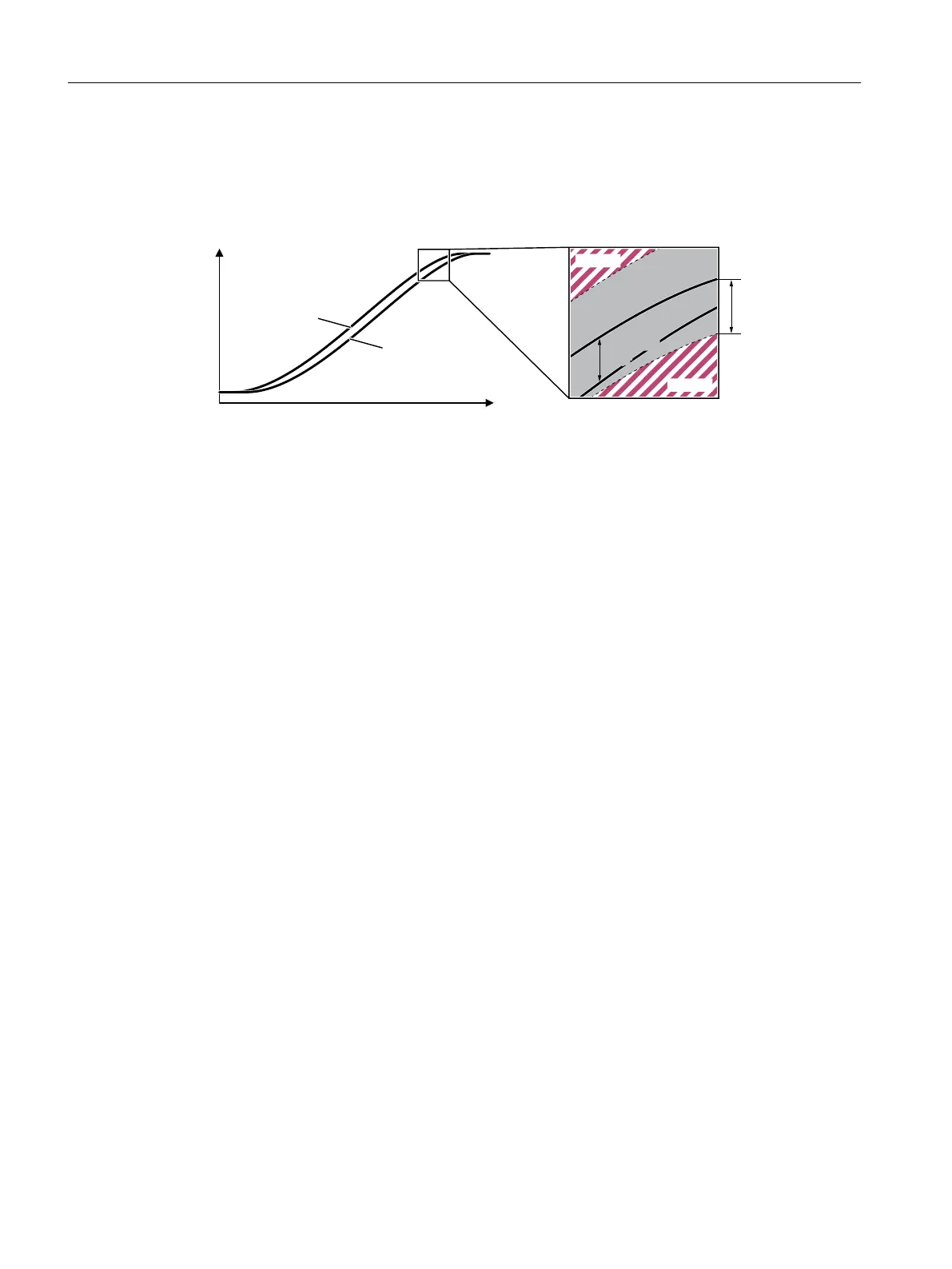
The following error is the deviation between the position setpoint and the position actual value
while the converter is positioning the axis. The converter reports fault F07452 if the following
error is too high. If you set the tolerance to 0, monitoring is deactivated.
3RVLWLRQ
DF
WXDOYDOXH
3RVLWLRQ
VHWSRLQW
)ROORZLQJ
HU
URU
7ROHUDQFH
W
V
)
)
Figure10-10 Following error monitoring
10.6.4 Homing
Ov
ervie
w
Homing re-establishes the reference between the zero point of the position calculated in the
converter and the machine zero point. Homing is a requirement for display of the correct
position for the technology object and for absolute positioning.
Absolute encoders retain their position information, even after the supply has been switched
o.
The converter oers various ways of homing the axis:
• Active homing - with all encoder types
• Passive homing - with all encoder types
• Set home position - with all encoder types
• Absolute encoder adjustment - with absolute encoders
Description of function
Homing can occur by means of an independent homing motion (active homing), the detection
of a homing mark during a motion initiated (passive homing) or a direct position assignment.
• Active homing
The converter automatically traverses the axis to a dened home position.
• Passive homing
The converter corrects its position actual value while traversing and reduces errors, e.g.
caused by wheel slip or a gear ratio that has not been precisely set.
• Set the home position and absolute encoder adjustment
The converter takes the reference point coordinate as the new axis position.
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
376 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB

 Loading...
Loading...






