10.4.6.7 Control and status word 2 for the positioner
Overview
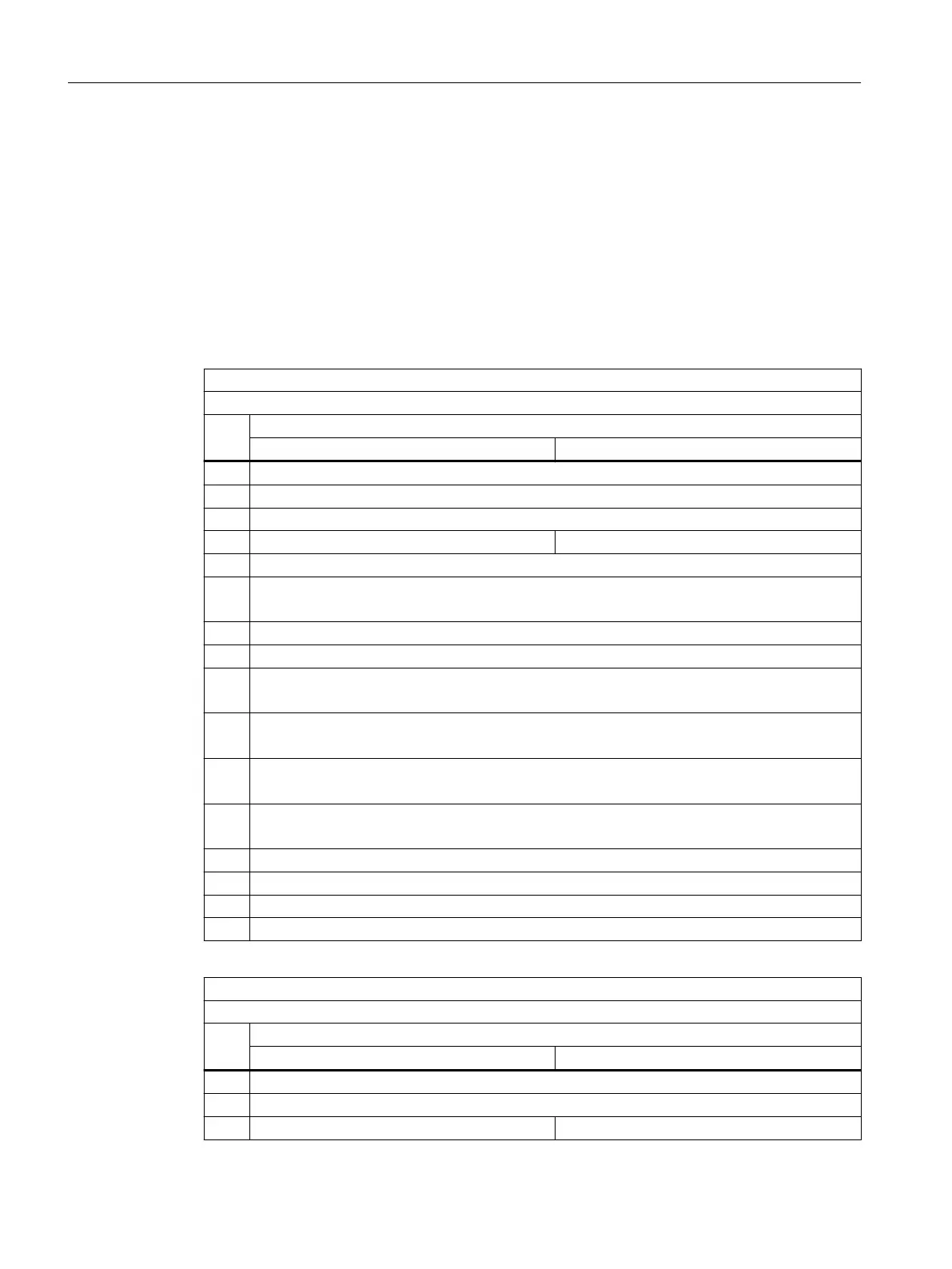
Positioning control word 2 (POS_STW2) activates the converter drive functions.
Positioning status word 2 (POS_ZSW2) signals the status of the converter to the higher-level
control.
Description of function
Positioning control word 2 (POS_STW2)
Control → Converter
Bit Function
Telegram 112 Telegram 111
0 1 = Tracking mode active
1 1 = Set home position
2 1 = Reference cam active
3 1 = Initiate absolute encoder adjustment Reserved
4 Reserved
5 1 = Jogging, incremental active
0 = Jogging, v
elocity active
6
Reserved
7 Reserved
8 1 = Select homing using passive homing
0 = Select homing via t
he home position approac
h
9 1 = Start the search for homing in the negative direction
0 = Star
t the search for homing in the positive direction
10 1 = Select measuring probe 2
0 = Select measuring probe 1
11
1 = Falling edge of the measuring probe
0 = Rising edge of the measur
ing probe
12 Reserved
13 Reserved
14 1 = Software limit switch active
15 1 = Hardware limit switch active
Positioning status word 2 (POS_ZSW2)
Converter → Control
Bit Status
Telegram 112 Telegram 111
0 1 = Tracking mode active
1 1 = Velocity limiting active
2 1 = Set position reached 1 = Setpoint x
ed
Functions
10.4Communication telegrams
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
354 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB

 Loading...
Loading...






