10.4.3.4 Telegram 5
Overview
The telegram is suitable for the closed-loop speed control and closed-loop position control of a
drive and to control 1 position encoder.
Requirement
PROFINET with IRT (Isochronous Real-Time)
Description of function
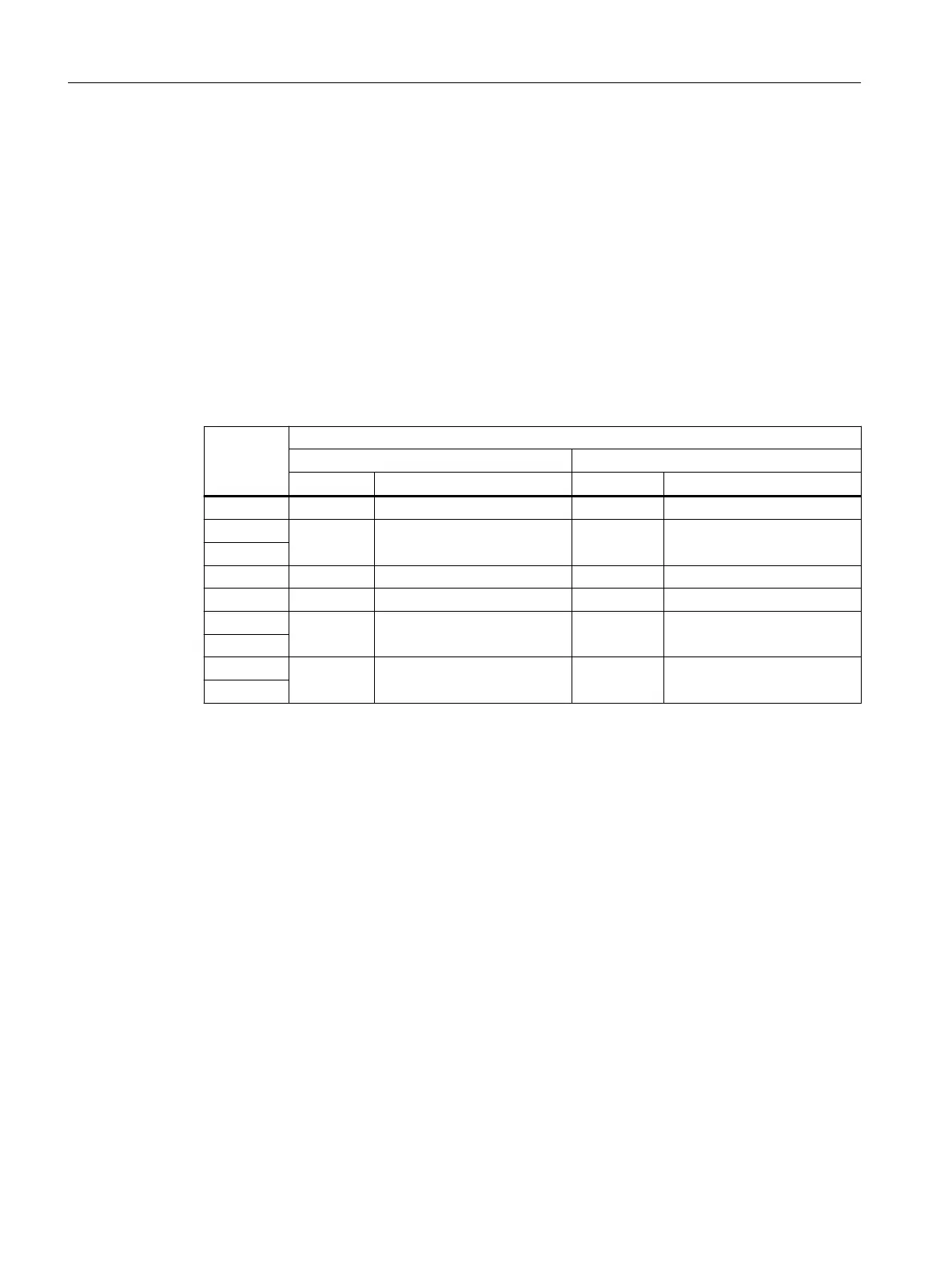
Process da‐
ta
Teleg
ram 5
Control → Converter Converter → Control
Signal Explanation Signal Explanation
PZD01 STW1 Control word1 ZSW1 Status word1
PZD02 NSOLL_B 32-bit speed setpoint NIST_B Speed actual value 32-bit
PZD03
PZD04 STW2 Control word2 ZSW2 Status word2
PZD05 G1_STW Control word for encoder 1 G1_ZSW Status word for encoder 1
PZD06 XERR Position controller deviation G1_XIST1 Position actual value 1 from
encoder 1
PZD07
PZD08 KPC Gain factor for the position
contr
oller
G1_XIS
T2
Position actual value 2 from
encoder 1
PZD09
Functions
10.4Communication telegrams
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
336 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB

 Loading...
Loading...






