10.4.4.3 Telegram 111
Overview
The telegram is suitable for closed-loop position control of a drive.
Description of function
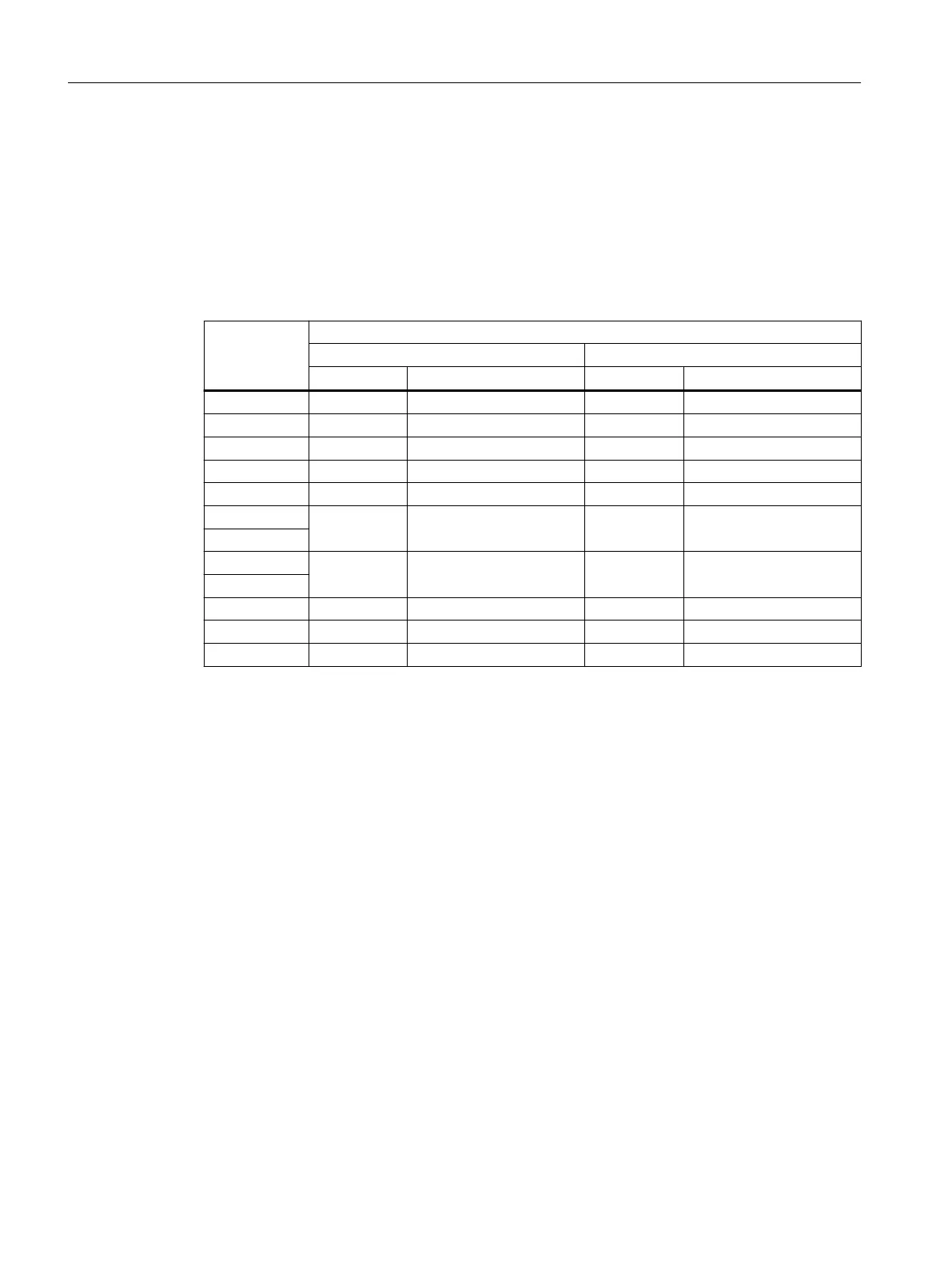
Process data Telegram 111
Control → Converter Converter → Control
Signal Explanation Signal Explanation
PZD01 STW1 Control word 1 ZSW1 Status word 1
PZD02 POS_STW1 Position control word POS_ZSW1 Position status word
PZD03 POS_STW2 Position control word POS_ZSW2 Position status word
PZD04 STW2 Control word 2 ZSW2 Status word 2
PZD05 OVERRIDE Position velocity override MELDW Message word
PZD06 MDI_TARPOS MDI position XIST_A Position actual value A
PZD07
PZD08 MDI_VELOCI‐
T
Y
MDI velocity NIST_B 32-bit speed actual value
PZD09
PZD10 MDI_ACC MDI acceleration override FAULT_CODE Fault code
PZD11 MDI_DEC MDI deceleration override WARN_CODE Alarm code
PZD12 --- --- --- ---
Functions
10.4Communication telegrams
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
340 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB

 Loading...
Loading...






