• Homing mark on the negative side of the digital input
• Positiv
e home position oset
3RVLWLRQ
9HORFLW\
$SSURDFKYHORFLW\
WRWKH]HURPDUN
$SSURDFKYHORFLW\WR
WKHKRPHSRVLWLRQ
=HURPDUN+RPLQJPDUN
+RPHSRVLWLRQ
+RPHSRVLWLRQRIIVHW
'LJLWDOLQSXWDVPHDVXULQJLQSXWIRUWKH]HURPDUN
²
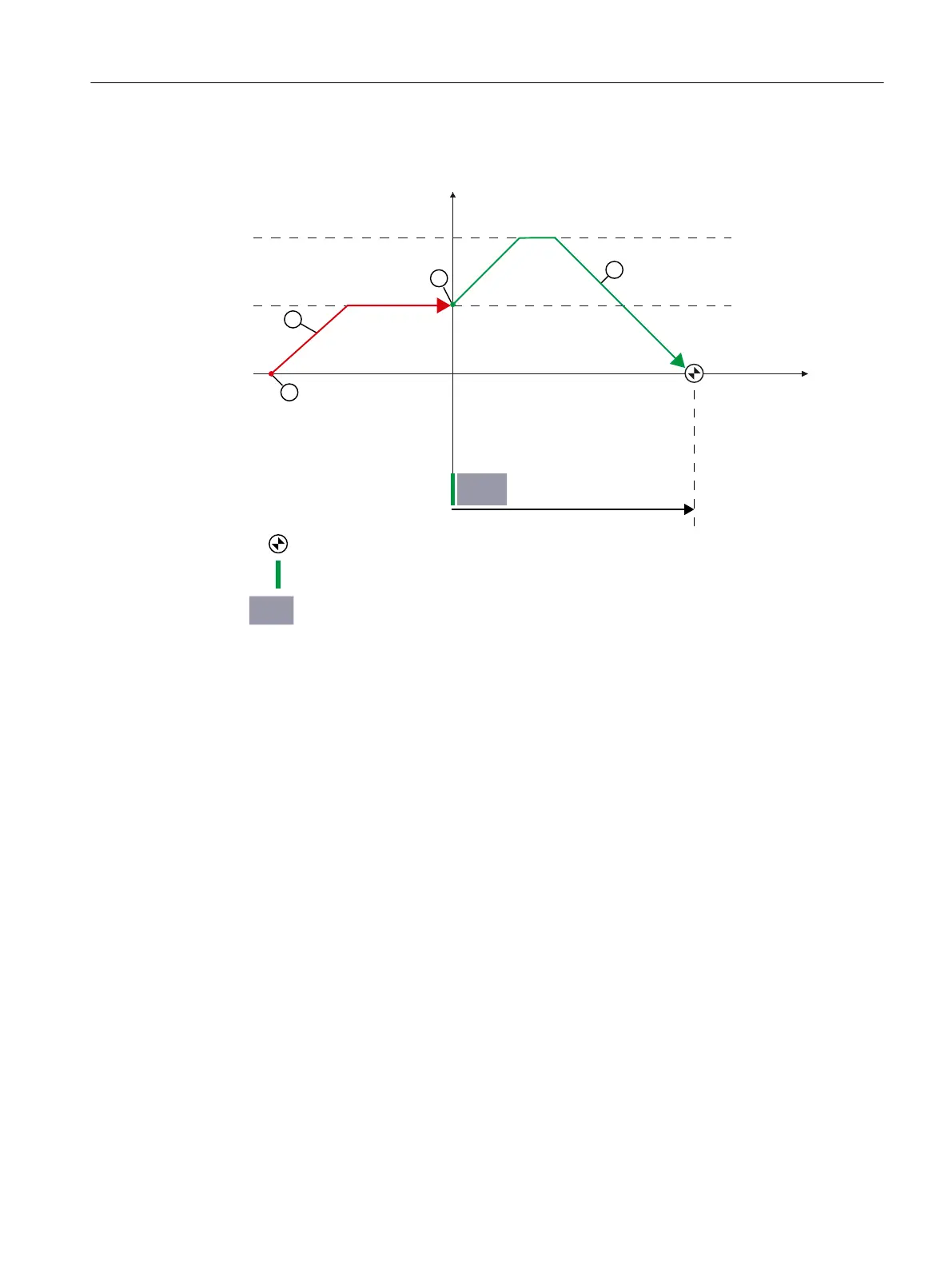
Motion sequence
① Start of active homing
② Approach to the homing mark in the homing direction with the corresponding approach
velocity to t
he zero mark
③ Detection of the homing mark via digital input
④ Approach to the home position with the corresponding approach velocity to the home position
Figure10-13 Example: active homing in positive direction by using external zero mark via digital
input
10.6.4.3 Pas
sive homing
Overvie
w
Passive homing is used to dynamically modify the current position value to zero when the axis
is working in any positioning state. With the "Passive homing" function, the loadside position
accuracy is increased because inaccuracies in actual value acquisition are compensated for. The
function can be used in every mode (jog, traversing block, direct setpoint specication for
positioning / setup) and is superimposed over the active operating mode.
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB 381

 Loading...
Loading...






