p2615 EPOS maximum number of traversing blocks
p2616[0...n] EPOS traversing block block number
p2617[0...n] EPOS traversing block position [mm]
p2617[0...n] EPOS traversing block position [°]
p2618[0...n] EPOS traversing block velocity [mm/s]
p2618[0...n] EPOS traversing block velocity [°/s]
p2619[0...n] EPOS traversing block acceleration override [%]
p2620[0...n] EPOS traversing deceleration override [%]
p2621[0...n] EPOS traversing block task
p2622[0...n] EPOS traversing block task parameter
p2623[0...n] EPOS traversing block task mode
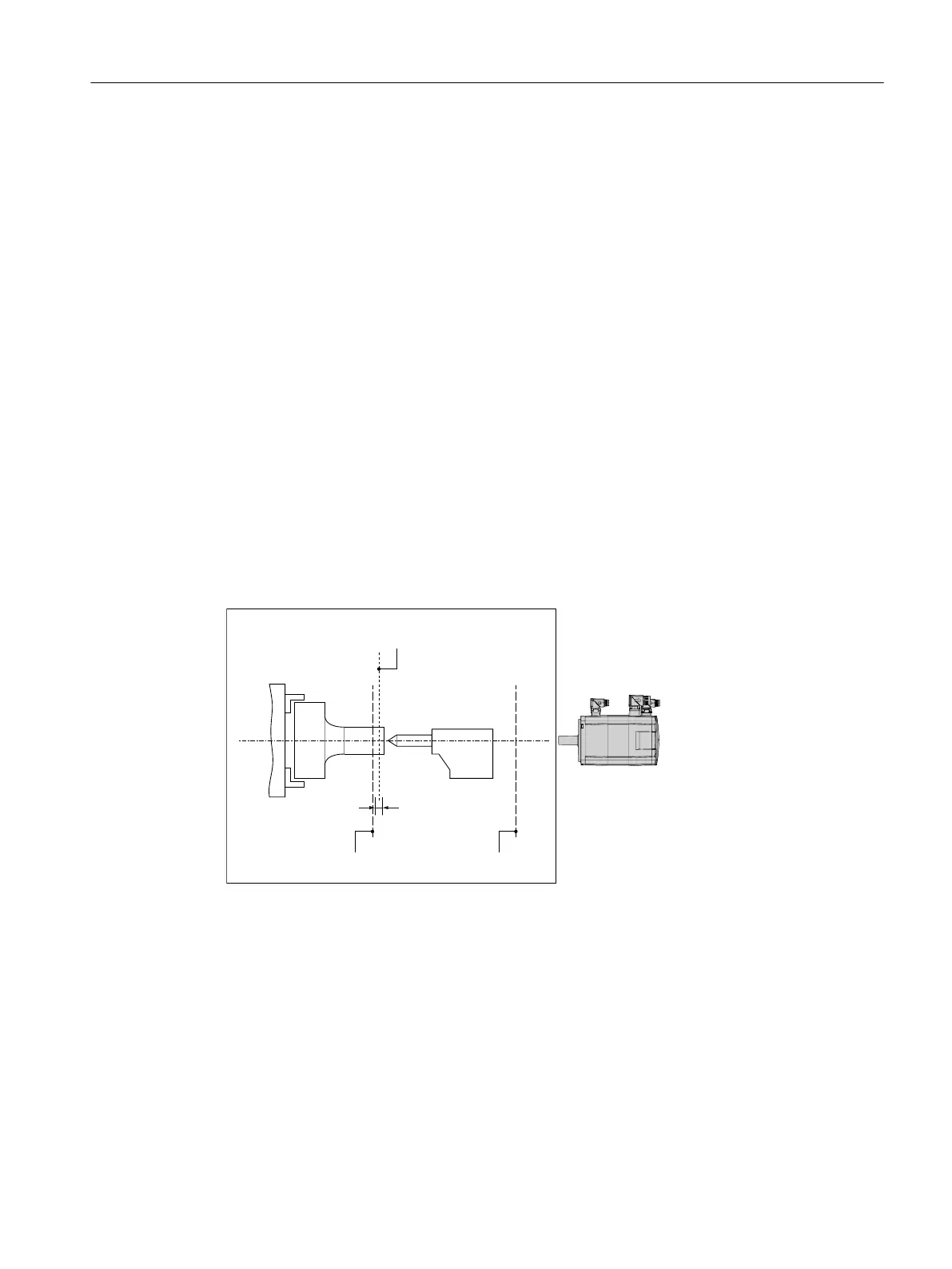
10.6.5.2 Travel to x
ed s
top
Overview
The "Travel to xed stop" function can be used, for example, to traverse sleeves to a xed stop
against the workpiece with a predened torque. In this way, the workpiece can be securely
clamped. The clamping torque can be parameterized in the traversing task (p2622). An
adjustable monitoring window for travel to xed stop prevents the drive from traveling beyond
the window if the xed stop should break away.
$FWXDOSRVLWLRQDIWHU
WUDYHOWRIL[HGVWRS
3URJUDPPHGVHWSRLQWSRVLWLRQ
)L[HGVWRS
PRQLWRULQJ
ZLQGRZ
6WDUWSRVLWLRQ
Description of function
In positioning mode,
travel to xed stop is started when a traversing block is processed with the
FIXED STOP command. In this traversing block, in addition to the specication of the dynamic
parameterized position, speed, acceleration override and delay override, the required clamping
torque can be specied as task parameter p2622. From the start position onwards, the target
position is approached with the parameterized speed. The xed stop (the workpiece) must be
between the start position and the braking point of the axis; that is, the target position is placed
inside the workpiece.
The preset torque limit is eective from the start, i.e. travel to xed stop also occurs with a
reduced torque. The preset acceleration and delay overrides and the current speed override
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB 389

 Loading...
Loading...






