3 Function diagrams
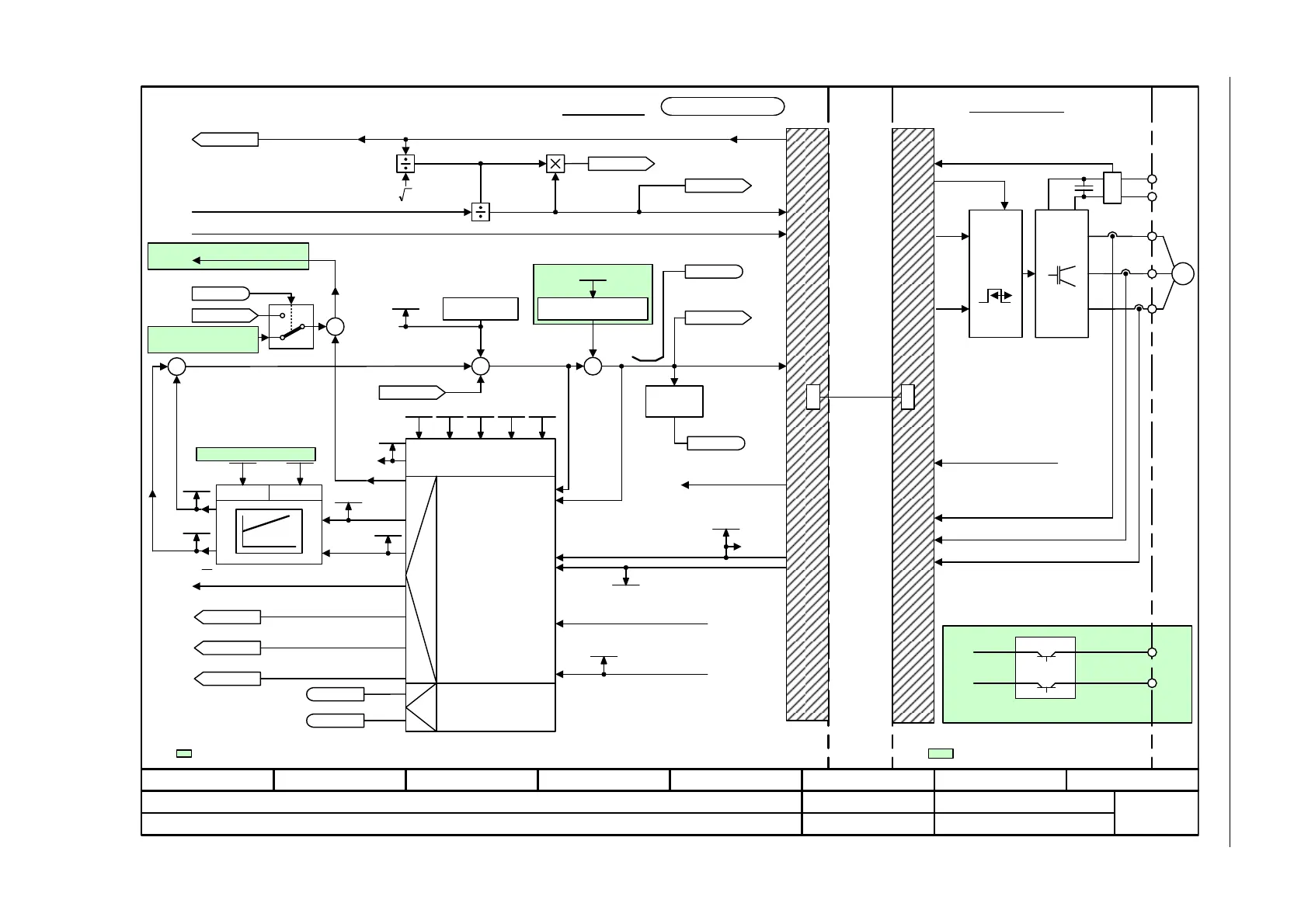
3.14 Vector control
SINAMICS G130/G150
1186 List Manual (LH2), 04/2014, A5E03263479A
Fig. 3-139 6730 – Interface to the Motor Module (ASM, p0300 = 1)
- 6730 -
Function diagram
87654321
fp_6730_54_eng.vsd
DO: VECTOR
S120/S150/G130/G150
28.01.14 V04.07.00
Vector control - Interface to the Motor Module (ASM, p0300 = 1)
DC link voltage
+ BRP
- BRN
Brake control
P24
M
Pulse enable
HW
= Only for vector ctrl. with encoder.
r0063[0]
n_act unsmoothed
r0084
Flux actual value
[6714.1]
r0094
Transformat_angle
r0087
Cos phi act
+
<1> Pre-control speed
[6030.8]
Control Unit
DRIVE-CLiQ
PWM
Motor Module
M
~
+
U
V
W
r0074
Modulation depth
2
U_set
U_angle
I_max Motor Module
r0066
U_output
Frequency negative
r0056.7
Frequency limit active
r0056.11
[6310.1]
[6799.1]
<3> Additionally for Booksize
[6714.8]
p0115[0] (Motor Modules)
[6799.1]
r0072
U_angle
[6799.5]
[6220.1]
[6723.1]
[6799.1]
r0070
Vdc_act
[6714.1]
I_Phase actual value
r0069[0...2]
U_Phase actual value
r0089[0...2]
p1755 p1756
+
[2526.2]
Sign
+ oder -
= Only for vector ctrl. without encoder.
<1>
[6714.1]
Stall monitoring
p1744
p1745
Model control
p1750
Motor model
(observer)
r1762, r1763,
r1778, r1779
Dir of rot p1821[D]
r1762.0
r1762.1
r1751
From therm Motor model
Kp Tn
r1771
r1770
1 = Encoderless operation active
r1407.1[2522.6]
1
0
+
r0061[0][4715.5]
<2>
[6300.8]
[6714.8]
[6300.1]
[6640.1]
Current model
[6310.5]
+
f_slip
r0065
p1760
p1764
p1761
p1767
<1>
p1758 p1759
[6799.5]
[6722.7]
Iq
M
[6640.5]
[6710.1]
Vibration damping
p1740
<1>
+
r1408.11
r1408.12
<2>
[8012.6]
[8012.7]
[4715.7]
+
+
+
+
[4715.5]
n_act calculation
<1>
[4715.7]
I_max Motor Module
R_stator act
r0395
<3>