Tuning
6
6.1 Control response
Function overview
Use
the "Automatic servo
tuning" function to tune the current, speed and position control loop
with feedforward control. The objective is the fine setting of an axis or spindle using
SINUMERIK Operate:
● Performing frequency response measurements
● Calculation of the speed control loop
● Setting of current setpoint filters
● Calculation of the position control loop
● Validation of the actual behavior of the control loops
● Feedforward control type: Equivalent speed control time
● Path interpolation
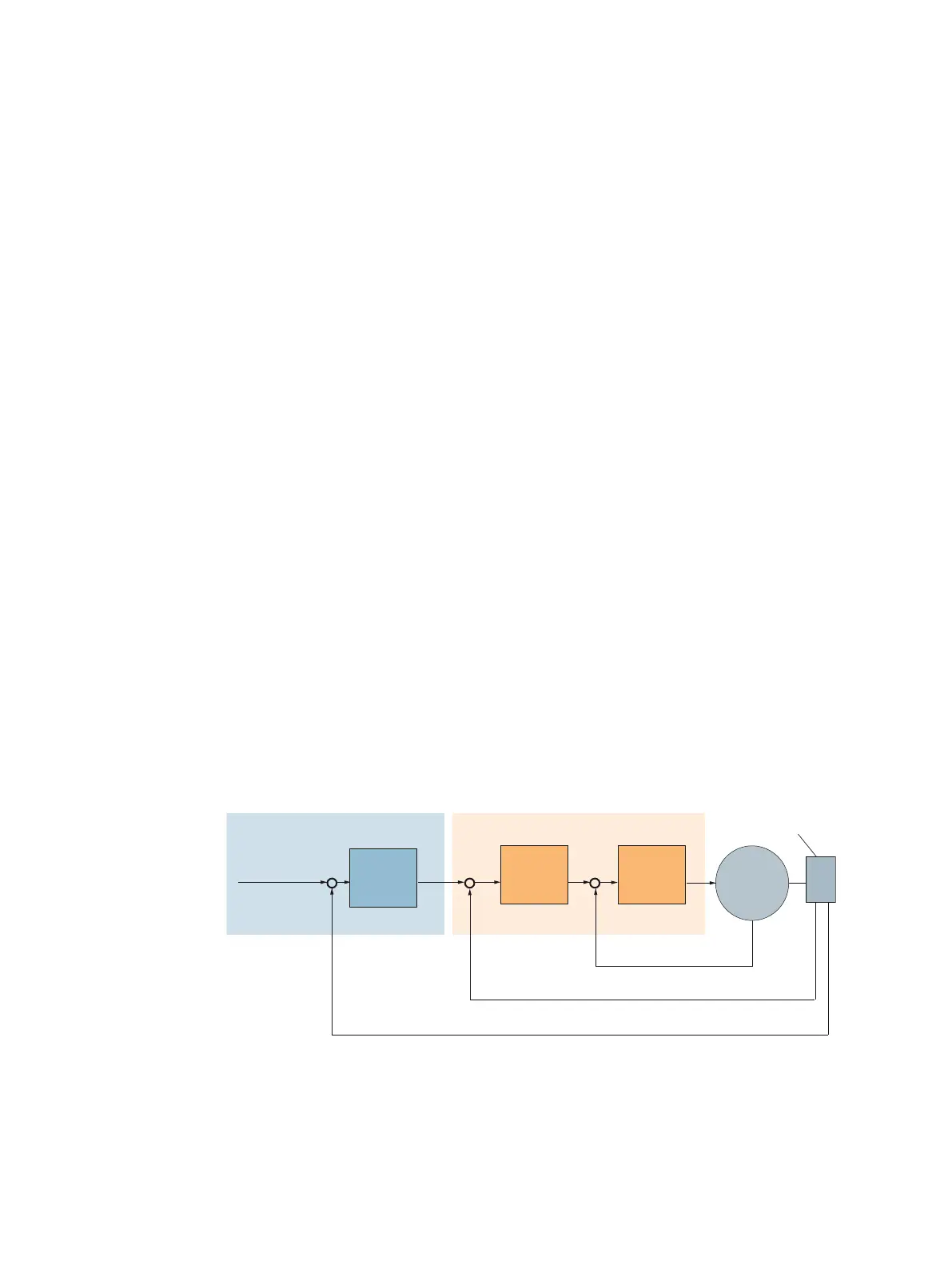
Closed-loop control
The controlled system involves three cascaded control loops:
● Current control loop
● Speed control loop
● Position control loop
$FWXDOFXUUHQWYDOXH
$FWXDOVSHHGYDOXH
352),%86'3GULYH
$FWXDOSRVLWLRQYDOXH
0RWRUHQFRGHU
0RWRU
3RVLWLRQVHWSRLQW
IURPWKH
LQWHUSRODWRU
&XUUHQW
FRQWUROOHU
6SHHG
FRQWUROOHU
3RVLWLRQ
FRQWUROOHU
L
DFW
Q
DFW
Q
VHW
L
VHW
6,180(5,.
Figure 6-1 Controlled system
Each of the individual control loops is tuned successively starting with the current controller,
the speed controller and
finally the position controller. The dynamic machine limits for velocity,
acceleration and jerk are set in the interpolator. Whereas the speed control loop is always
CNC commissioning
Commissioning Manual, 10/2015, 6FC5397-3DP40-5BA3 167

 Loading...
Loading...














