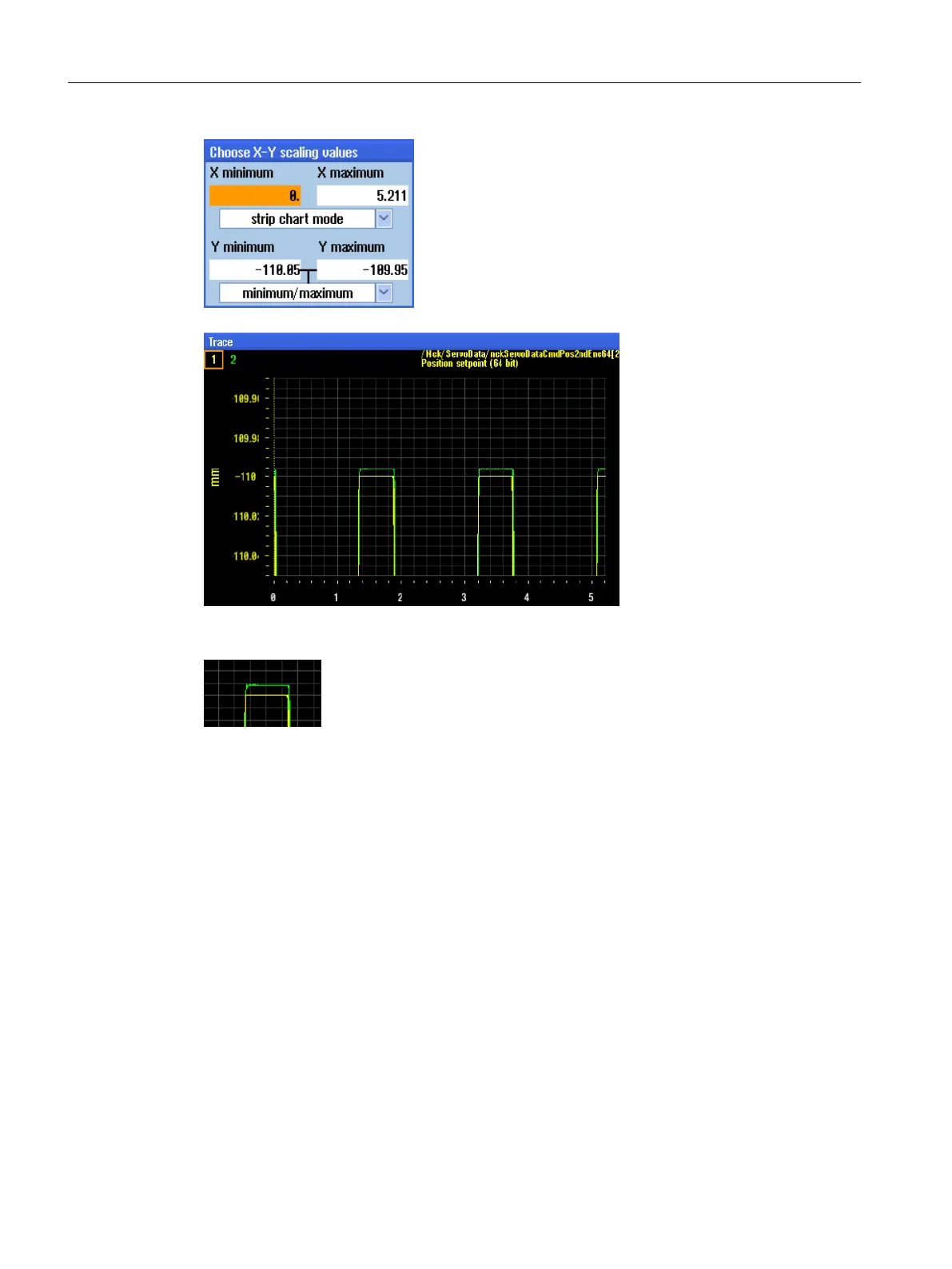
View in detail:
Position setpoint (yellow) and actual position (green) do not match because the position
controller is not active.
6.3.4 Optimizing the jerk setting
Tuning objective
The jerk must
be set so that the actual position is not exceeded. This is done by setting a jerk
value that is too high.
A jerk value that is too low can also be disadvantageous for the machine because it affects
the time required for positioning an axis. Without the position controller, the axis is positioned
without overshooting.
The remaining positioning error results from the position controller being deactivated and the
axis moves only with feedrate signals. An overshooting on reaching the position that results
from the mechanical system can be prevented by using a jerk limitation.
Tuning
6.3 Optimizing the axis jerk
CNC commissioning
188 Commissioning Manual, 10/2015, 6FC5397-3DP40-5BA3

 Loading...
Loading...














