Design Guidelines
Puck Limits
MagneMover LITE User Manual 125
Rockwell Automation Publication MMI-UM002F-EN-P - October 2022
High Inertia Payloads
The following guidelines are provided when using loads with a high inertia that are mounted
on the puck. High inertia loads typically have a large off-center mass, have a high center of
gravity, or exceed the payload envelopes that are shown in Figure 3-27, Figure 3-30,
Figure 3-33, and Figure 3-36. Contact your Motion Solutions Consultant or Technical Support
(see Rockwell Automation Support on page 486) for design guidelines for applications where
the payload does not fit into the envelope shown in Pucks on page 105.
Vehicle motion can become erratic due to the inertia of the vehicle and payload as it enters and
exits curves. The larger the inertia, the more erratic motion is through both curve motors and
the curve section of switches. This erratic behavior becomes worse as the mass or velocity is
increased. Use a high payload switch (shown in Figure 4-27 and Figure 4-30) to help avoid
some of the erratic motion when moving through a switch.
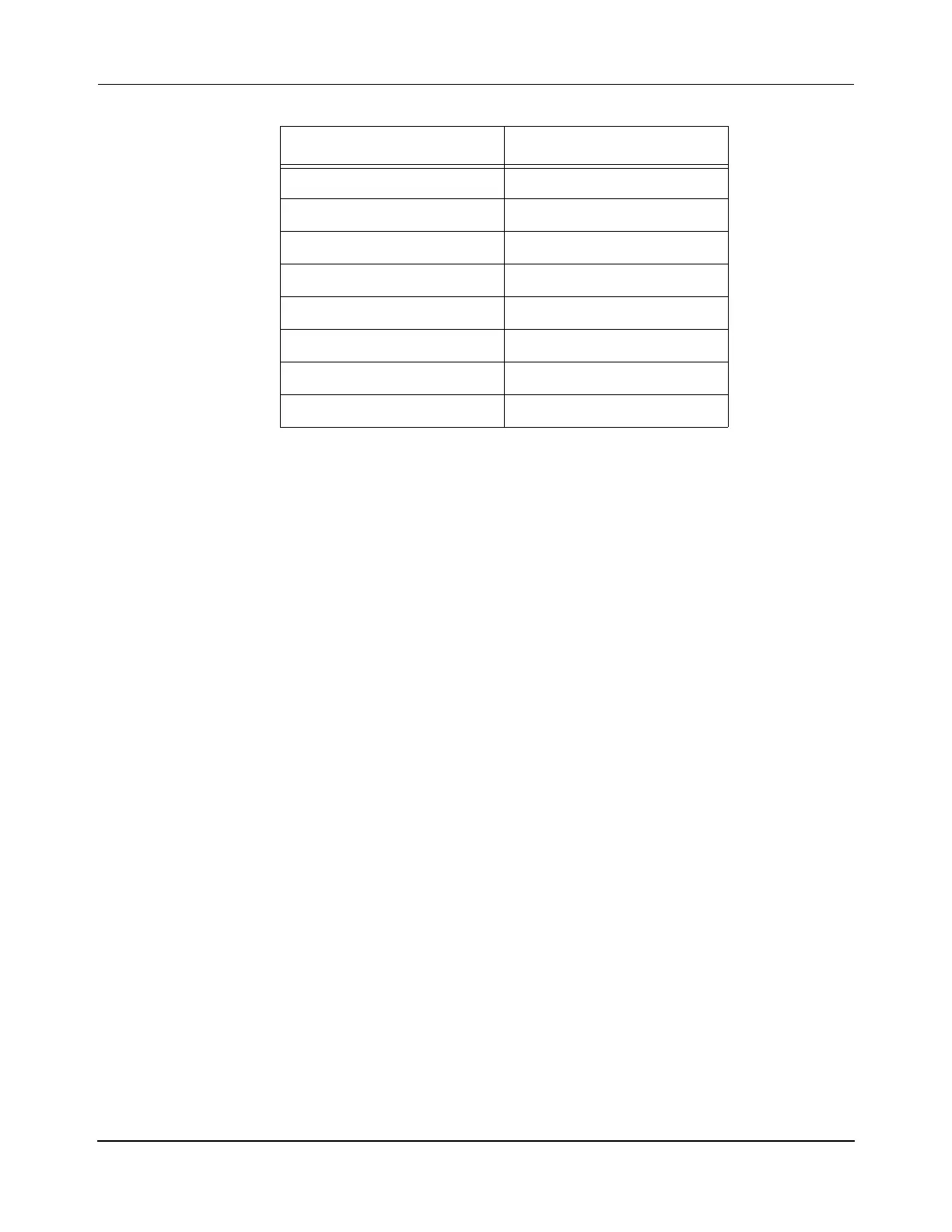
80 321
90 293
100 270
110 250
120 233
130 218
140 205
150 193
Table 3-4: Single Glide Puck Carrier Overhang Limits (Continued)
Overhang Length (mm) Maximum Load (g)
 Loading...
Loading...



