Design Guidelines
Transport System Layout
76 MagneMotion
Rockwell Automation Publication MMI-UM002F-EN-P - October 2022
Paths
Once all motors have been identified on the MM LITE transport system layout, the individual
paths must be defined (see Figure 3-2 for an example). Path definition includes identifying all
motors on the path and the direction of forward (downstream) motion.
Paths define the routes for vehicle motion. All paths include one or more motors arranged end
to end. All paths in the transport system must begin at a node and the motor at that node is
connected to a node controller. Paths can end at a second node, depending on the use of the
path. Paths are unique and do not overlap. Each path is provided a unique identifier in the
Node Controller Configuration File. Each motor is identified as belonging to a specific path
and provided a unique identifier in the Node Controller Configuration File. The node control-
ler connection to a path is either direct when using RS-422 communication or through the
transport system network when using Ethernet communication.
The node controller that is connected to the upstream end of the path controls the path. Paths
must have a connection to a node controller at their downstream end if a vehicle (puck) moves
off the downstream end of the path, either onto another path or onto another type of transport
system. See the MagneMover LITE Configurator User Manual, MMI-UM008, for a detailed
description of paths.
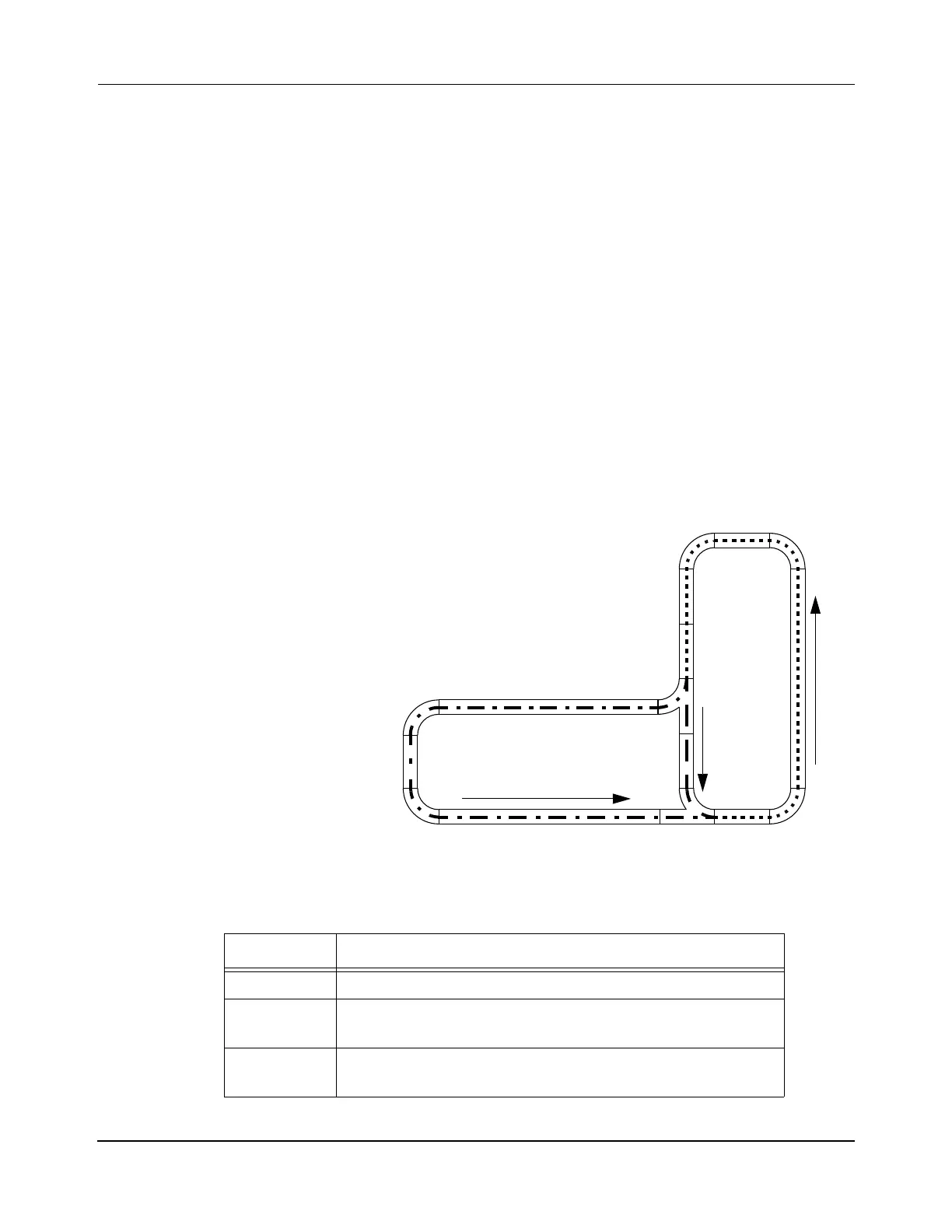
Figure 3-2: Sample MM LITE Transport System Layout Showing Paths
NOTE: MagneMover LITE switches are not available for systems that use railless motors.
Table 3-1: Motor Assignments
Path Motors
1 4 – 250 mm straight, 3 – 90° curve, 1 – 1000 mm straight
2 1 – 250 mm straight
1 – 250 mm straight part of switch, 1 – 90° curve part of switch
3 1 – 250 mm straight, 2 – 90° curve, 2 – 1000 mm straight
1 – 250 mm straight part of switch, 1 – 90° curve part of switch
3 1000 mm motor
6 250 mm motor
5 90° curve motor
2 Right switch
Qty Description
Path 3
3 Paths
NOTE: Arrows indicate direction of forward motion.
Path 1
Path 2
 Loading...
Loading...



