Design Guidelines
Transport System Design
92 MagneMotion
Rockwell Automation Publication MMI-UM002F-EN-P - October 2022
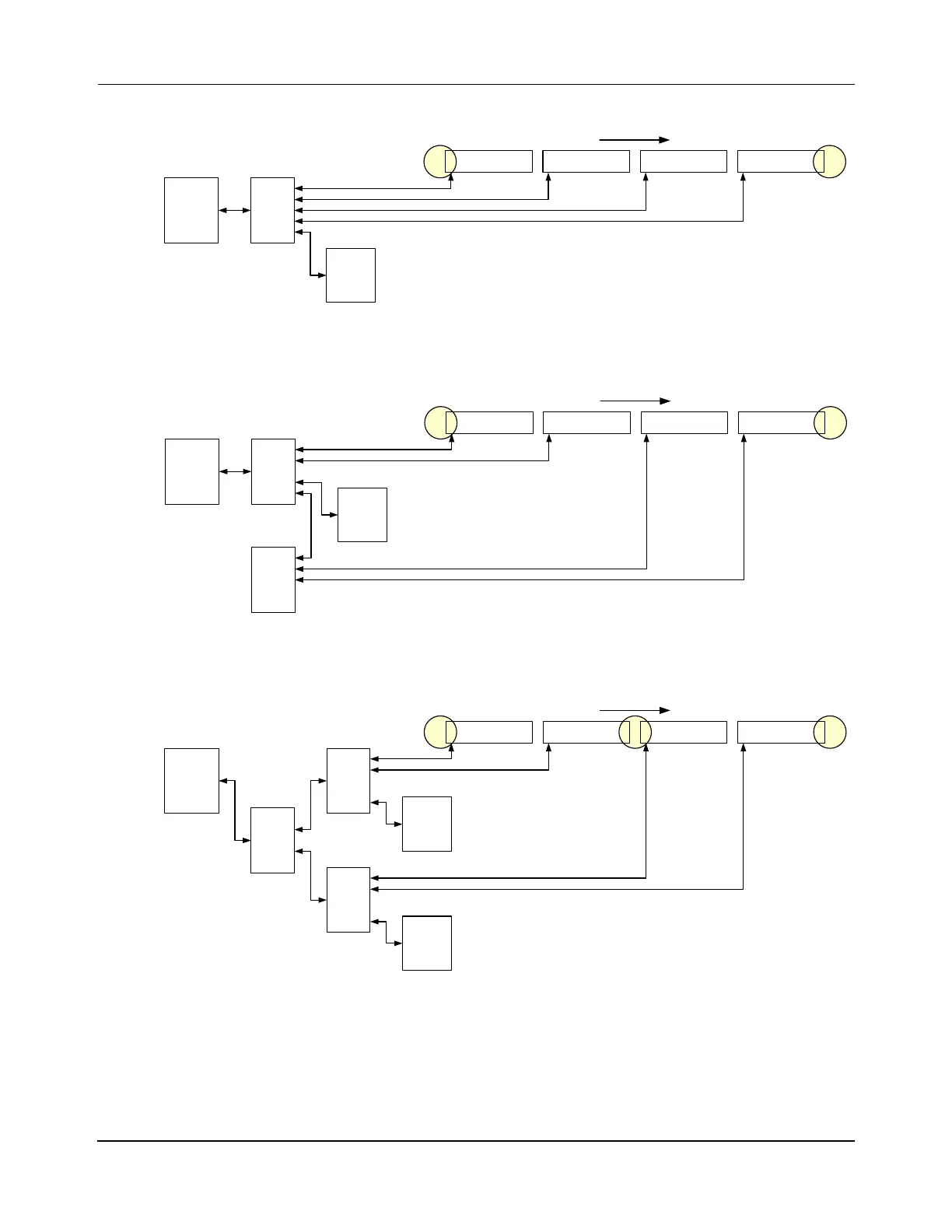
Figure 3-12: Ethernet Motor Wiring – One Path, Ethernet Star
Figure 3-13: Ethernet Motor Wiring – One Path, Ethernet Star, Multiple Ethernet Switches
Figure 3-14: Ethernet Motor Wiring – Two Paths, Ethernet Star, Multiple Node Controllers
Term
Node
Simple
Node
Enet Motor
Host
Controller
Enet Motor Enet Motor Enet Motor
Enet
Switch
HLC &
Node
Controller
Straight Transport System:
One Enet Connection per Motor, Star Topology,
One Path
x.y.0.10
P1M1
x.y.1.1
P1M2
x.y.1.2
P1M3
x.y.1.3
P1M4
x.y.1.4
Ethernet
Downstream
Term
Node
Simple
Node
Enet Motor
Host
Controller
Enet Motor Enet Motor Enet Motor
Enet
Switch
HLC &
Node
Controller
Enet
Switch
Straight Transport System:
One Enet Connection per Motor, Multiple Enet Switches,
One Path, Star Topology
x.y.0.10
P1M1
x.y.1.1
P1M2
x.y.1.2
P1M3
x.y.1.3
P1M4
x.y.1.4
Ethernet
Ethernet
Downstream
Relay
Node
Term
Node
Simple
Node
Enet Motor
Host
Controller
Enet Motor Enet Motor Enet Motor
Enet
Switch
Node
Controller
Enet
Switch
HLC &
Node
Controller
Enet
Router
Straight Transport System:
One Enet Connection per Motor with Multiple Subnets,
Two Pat hs, St ar To po logy
x.14.0.10
x.15.0.10
10.14.0.100 x.14.0.1
x.15.0.1
P1M1
x.14.1.1
P1M2
x.14.1.2
P2M1
x.15.2.1
P2M2
x.15.2.2
Ethernet
Ethernet
Downstream
 Loading...
Loading...



