Introduction
Transport System Components Overview
44 MagneMotion
Rockwell Automation Publication MMI-UM002F-EN-P - October 2022
Transport System Components Overview
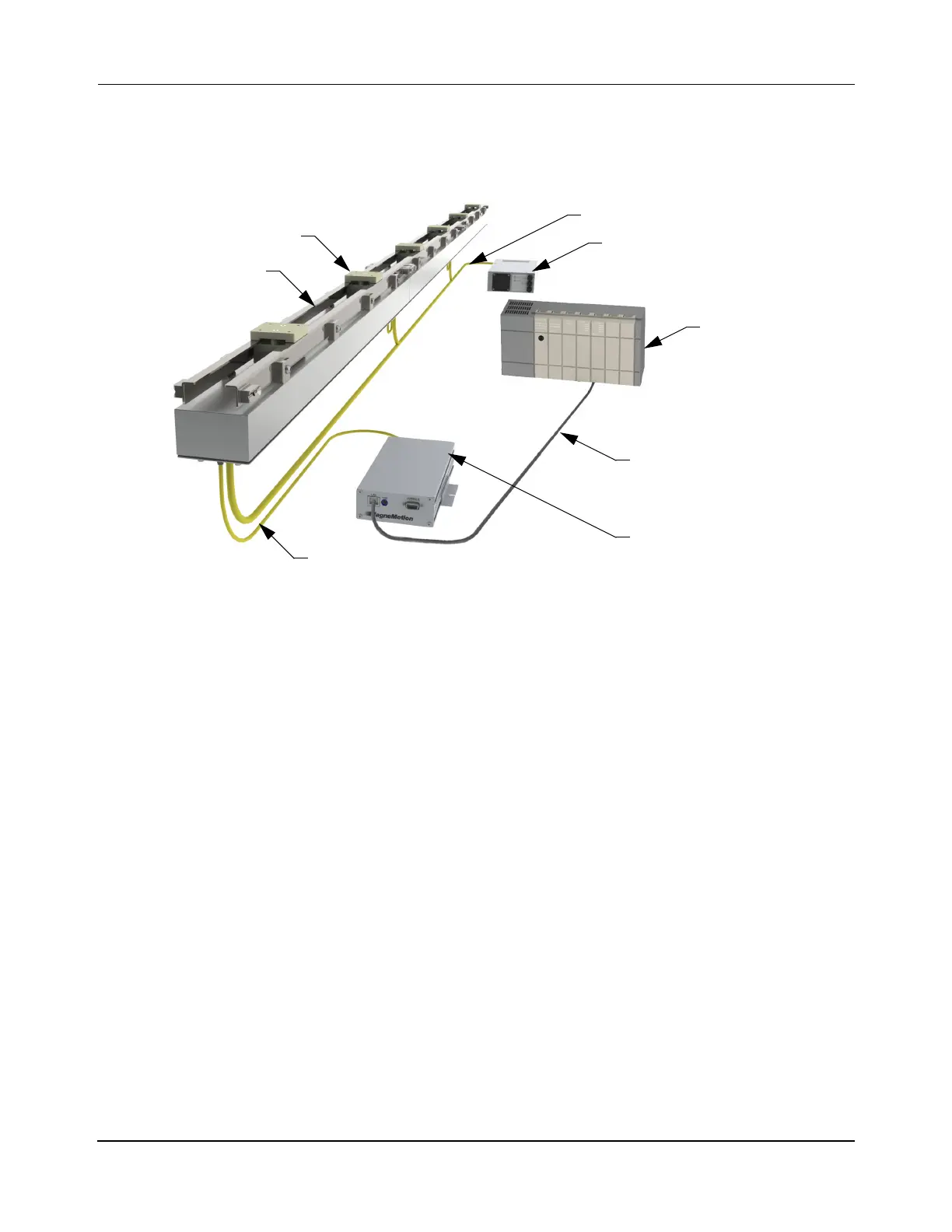
This section identifies the components of a MagneMover LITE transport system as shown in
Figure 1-7 and described after the figure.
Figure 1-7: Simplified View of the MagneMover LITE Transport System Components
• DC Power Cables and Communication Cables – Distributes DC power to the
motors and carries communications, such as RS-422 or Ethernet, between the compo-
nents of the transport system.
• High-Level Controller (HLC) – Software application that is enabled on one node
controller. This application handles all communication with the user-supplied host
controller and directs communication as appropriate to individual node controllers.
• Host Controller – User-supplied controller for control and monitoring of the Magne-
Motion transport system using either TCP/IP or EtherNet/IP
™
communication.
• Motor/Stator – Refers to the MagneMover LITE linear synchronous motor (LSM).
• Network – Ethernet network providing communication (TCP/IP or EtherNet/IP)
between the host controller and the HLC (TCP/IP is used between node controllers).
• Node Controller (NC) – Coordinates motor operations and communicates with the
HLC. Several types of node controllers are available. All node controllers support
Ethernet communication with the host controller and the motors, and depending on the
model, provide up to 12 RS-422 ports for communication with the motors. Some node
controller models also provide Digital I/O and/or Serial I/O for external devices such
as switches, E-stops, light stacks, and interlocks.
• Power Supply – Provides DC power to the motors.
• Vehicle (Puck) with Magnet Array – Carries a payload through the MM LITE trans-
port system as directed. The magnet array is mounted to the vehicle (puck) facing the
motors and interacts with the motors, which move each vehicle independently.
Host Controller
DC Power Cables
Power Supply
Motors
Motor Communication Cables
Node Controller
(and High-Level Controller)
Vehicles (Pucks)
Network
(Ethernet)
 Loading...
Loading...



