Operation
Theory of Operation
322 MagneMotion
Rockwell Automation Publication MMI-UM002F-EN-P - October 2022
Thrust Limitations
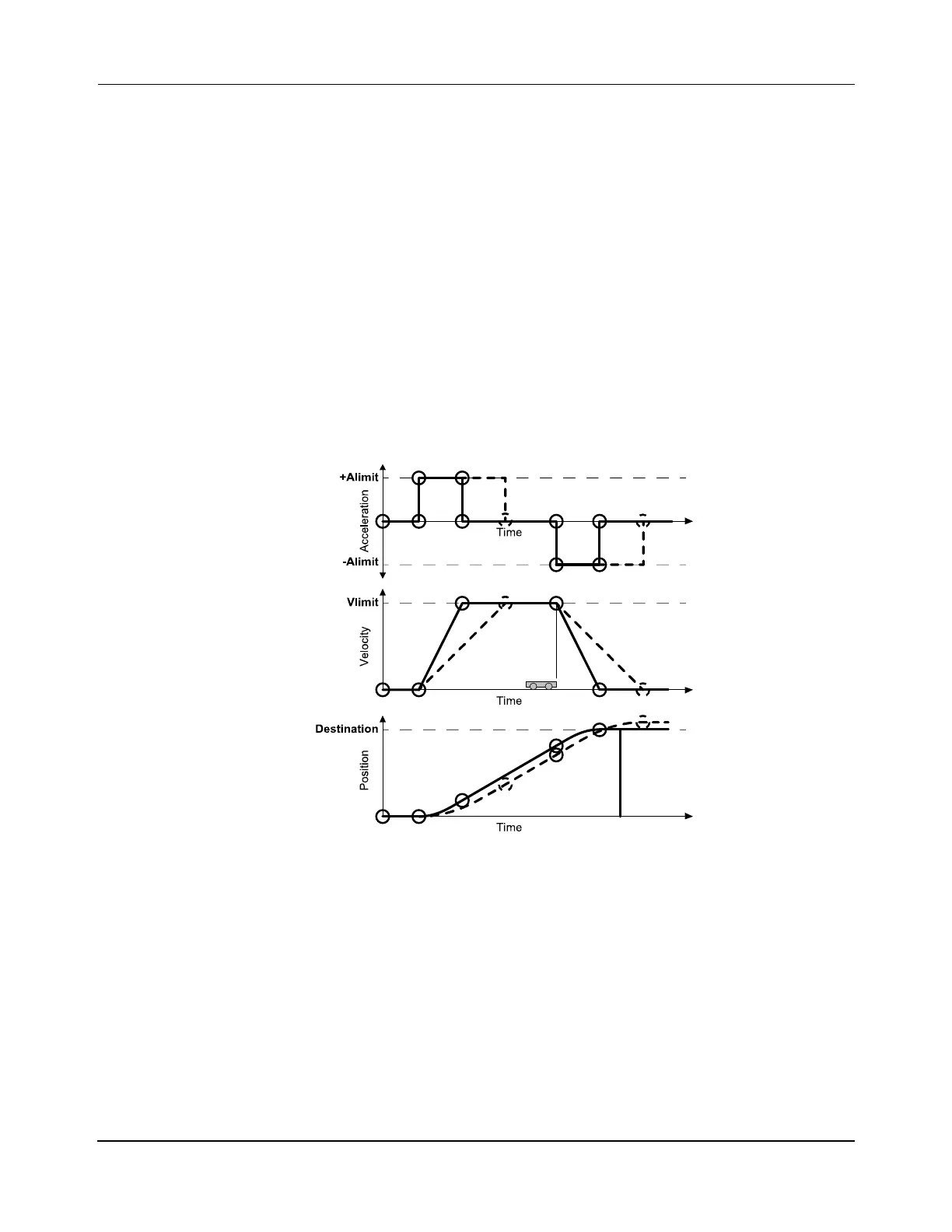
When a vehicle is commanded with a higher acceleration rate than the motor can provide, the
vehicle falls behind its ideal move profile while accelerating. Figure 6-6 shows both the ideal
move profile (solid line) and the degraded move profile (dashed line).
In addition, and more critically, the vehicle is not able to decelerate at the specified rate and
overshoots its destination as shown by the dashed line in Figure 6-6. This behavior can result
in vehicles colliding with other vehicles or switch components, or loss of control of a vehicle
as it exits the area where it has permission to move. Thus, it is important to avoid command-
ing a move with an acceleration that is higher than the deceleration capability of the system.
The precise deceleration capability depends on vehicle mass (including payload), center of
gravity location, speed, and track geometry. Furthermore, the thrust capability of ML compo-
nents varies by type, and are reduced in proximity to the gaps between motors. Straight motor
sections have the highest thrust, followed by curves, and finally by switches.
Figure 6-6: Vehicle Movement Profile Showing Thrust Limitations
Vehicles In Queue
Typically, vehicles (pucks) queue up while in route to a particular destination when another
vehicle obstructs the route. Obstructions are normal occurrences, jams are not. While in
queue, the vehicles can be as close together as permitted by the system. The amount of space
in between the carriers that are mounted on the vehicles depends on the defined length of the
vehicle. All vehicles in the queue report being obstructed.
An obstruction indicates that something that the system knows about is keeping the vehicle
from completing its current motion order. This obstruction could be another vehicle, a node
not ready for a vehicle, or a path that is suspended or has not completed startup. Once the
 Loading...
Loading...



