17 Function library
17.1 Function blocks | L_Odometer_1
1445
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
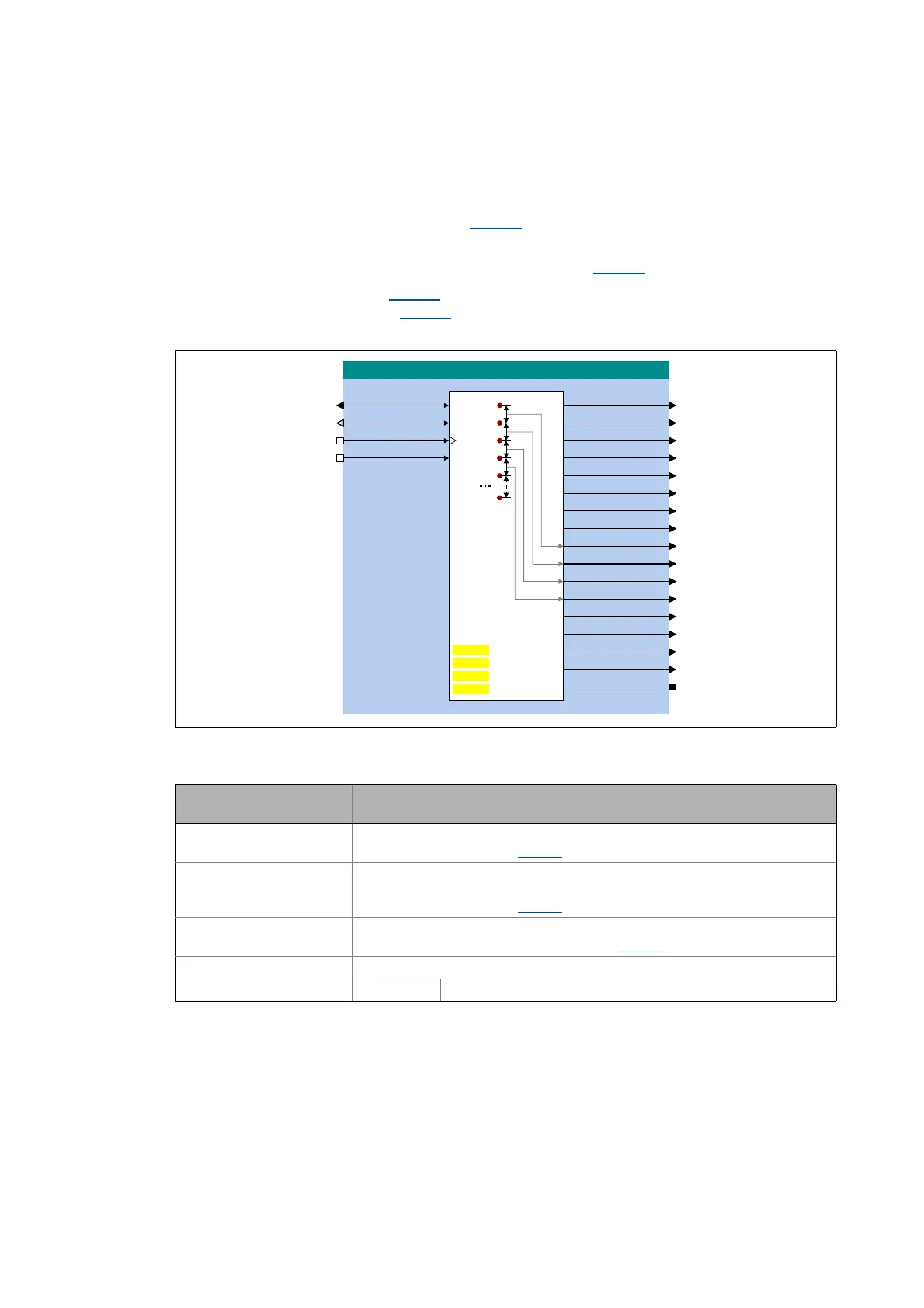
17.1.119 L_Odometer_1
This FB can be used to record positions and calculate distances.
• Depending on the input selection set in C01022
, a position signal can be detected at the
dnInPosition_p input or a speed can be detected at the nInSpeed_v input.
• The position is detected/accepted via the edge selected in C01023
at the bTriggerPulse input.
• If "Ring buffer" is selected in C01021
, the measurement will start all over again after the number
of measurements selected in C01020
has been performed and the old values will be
overwritten. Otherwise, the measurement will stop.
Inputs
Designator
Data type
Information/possible settings
dnInPosition_p
DINT
Position measurement input
• Input is only evaluated if C01022
= "0: Pos input" has been set.
nInSpeed_v
INT
Speed measurement input
• The speed is internally integrated into a position.
• Input is only evaluated if C01022
= "1: V input" has been set.
bTriggerPulse
BOOL
Detect position/speed
• The tripping edge can be parameterised in C01023
.
bReset
BOOL
Reset measurement results and internal integrator
TRUE Reset measurement results and internal integrator.
/B2GRPHWHUB
GQ,Q3RVLWLRQBS
GQ,Q6SHHGBY
E7ULJJHU3XOVH
E5HVHW
& 0HPRU\GHSWK
&
0HPRU\W\SH
&
,QSXWVHOHFWLRQ
&
(GJHVHOHFWLRQ
GQ3RV2XWBBS
GQ3RV2XWBBS
GQ3RV2XWBBS
GQ3RV2XWBBS
GQ3RV2XWBBS
GQ3RV2XWBBS
GQ3RV2XWBBS
GQ3RV2XWBBS
GQ'HOWD3RVBBS
GQ'HOWD3RVBBS
GQ'HOWD3RVBBS
GQ'HOWD3RVBBS
GQ'HOWD3RVBBS
GQ'HOWD3RVBBS
GQ'HOWD3RVBBS
GQ'HOWD3RVBBS
Z/DVW0HDVXUH
3RV
3RV
3RV
3RV
3RV
3RV

 Loading...
Loading...








